
Микроробот с гибкой конструкцией Robo Bee обеспечивает управляемый полет
Проект Robo Bee уже много лет привлекает наше внимание. Мы с интересом наблюдали, как последующие разработки позволили крошечной машине летать, плавать, зависать, и выполнять множество других функций

Проект Harvard Robo Bee уже много лет привлекает наше внимание. Мы с интересом наблюдали, как последующие разработки позволили крошечной машине летать, плавать, зависать, и выполнять множество других функций.
В рамках новой разработки Robo Bee стал первым микророботом, который достиг контролируемого полета с помощью мягких исполнительных механизмов - искусственных мышц, которые позволяют машине двигаться.
Преимущества метода, используемого в Robo Bee
Основным преимуществом мягких приводов является повышенная упругость микророботов благодаря их малой массе. Наличие мягких искусственных мышц позволяет Robo Bee избегать повреждений при столкновении со стенами, падении на пол или столкновении с другими Robo Bees. Сложность состоит в том, чтобы сделать мягкие исполнительные механизмы достаточно мощными, чтобы устройство взлетело, и в то же время предоставить микророботу достаточный контроль для возможности зависания.
Считается, что технология мягкого привода Гарварда первой сделала эти прорывы. Эта разработка –результат совместной работы Гарвардской школы инженерных и прикладных наук им. Джона А. Полсона (SEAS) и Института биологической инженерии Висса. Исследователи основывались на существующей технологии электрического мягкого привода с использованием 100-миллиграммовых эластомеров, которые деформируются при воздействии электрического поля.
Именно благодаря улучшению проводимости электродов, применяющих поле, исследователи смогли сопоставить характеристики жестких приводов, традиционно используемых в микророботах, при достижении плотности мощности 600 Вт на килограмм. Кроме того, исследователи добились улучшенной стабильности, создав легкий планер для размещения на микророботе кусочка нити, который используется для предотвращения изгиба привода - то, что обычно происходит во время полетов.
Типы Robo Bee и их тестирование
Исследователи продемонстрировали эту технологию с двумя и четырьмя крыльями. Вариант с двумя крыльями может взлететь с земли, в то время как модель с четырьмя крыльями, в комплекте с двумя приводами, может продолжать полет, несмотря на то, что выдержала несколько столкновений в окруженной препятствиями среде. Они даже управляли двумя четырех-пропеллерными моделями, чтобы показать, что те могут продолжать, полет даже после столкновения друг с другом.
Они также построили модель с восемью крыльями, используя четыре исполнительных механизма. Эти версии Robo Bee с мягким приводом в настоящее время очень зависимы от пользователя - питание обеспечивается через бортовые усилители, а навигация работает с помощью внешней системы захвата движения. Исследователи надеются, что эта технология может найти применение в поиске и спасении, потенциально позволяя роботам летать среди обломков и в замкнутых пространствах.
Говорят, что мягкие приводы легко собирать и заменять, но следующая задача - повысить их эффективность, что характерно для типичных микророботов с жесткими приводами. Исследовательская работа команды под названием «Управляемый микроробот с мягкими искусственными мышцами» была опубликована в журнале Nature. Вы можете увидеть Robo Bees в действии в видео ниже.
Автор статьи: Виктор Булавин
Похожие статьи:

 Робот торгового автомата предлагает свежий салат на заказ
Робот торгового автомата предлагает свежий салат на заказ

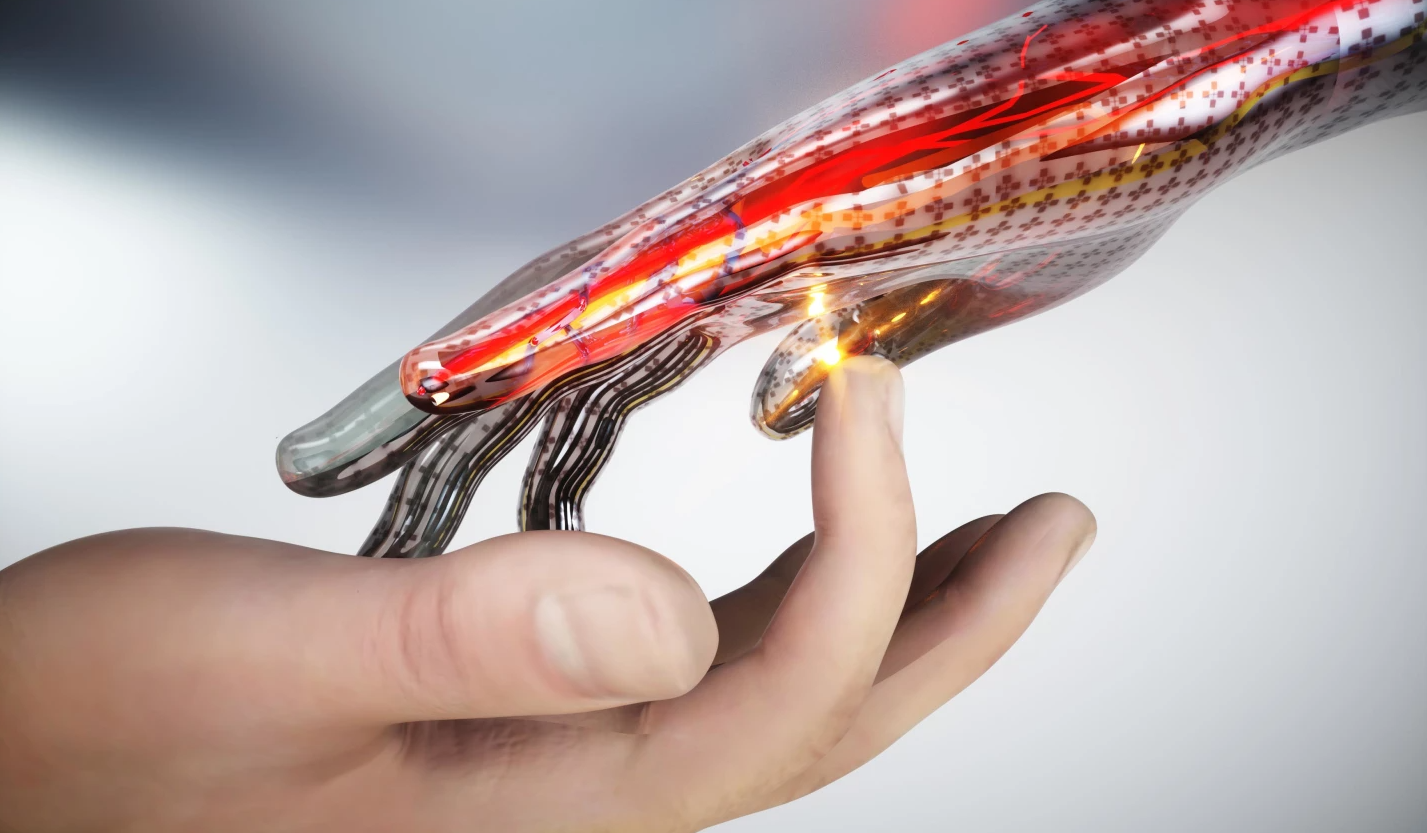 Имитирует человеческую реакцию на боль первая в своем роде электронная кожа
Имитирует человеческую реакцию на боль первая в своем роде электронная кожа

 Помочь в борьбе с COVID-19 могут роботы
Помочь в борьбе с COVID-19 могут роботы

 Трансформация больших объёмов данных в нужную информацию - новый метод Sandia
Трансформация больших объёмов данных в нужную информацию - новый метод Sandia
 Деятельность роботов может влиять на детей
Деятельность роботов может влиять на детей
 Удаленно мониторить раны смогут графеновые повязки
Удаленно мониторить раны смогут графеновые повязки







