
- Главная
- >
- Новые технологии в Мире
- >
- Новые электронные технологии
- >
- Прыгающий робот-паук
Прыгающий робот-паук
Пауки используют шелковые привязки, чтобы помочь им совершать контролируемые прыжки, и теперь роботы тоже оснащаются анологичной технологией для контроля в пространстве

Большая часть недавних исследований роботов-прыжков использовала биологию в качестве вдохновения. Например, хвостовик UC Berkeley использует искусственный хвост с динозавром, который помогает контролировать его ориентацию в воздухе. Другим прыгающим видам не так повезло, что они оснащены хвостами, и им приходится искать другие способы беспомощного беспорядка в середине прыжка и посадки лица при посадке. Одним из самых плодовитых семейств прыгающих животных является прыгающий паук: есть что-то вроде 5000 видов по всему миру, а вместо того, чтобы строить паутины и просто сидеть, пока в них не что-то промахивается, прыгающие пауки активно охотятся за своей добычей, используя свое прекрасное видение чтобы увидеть обед, преследовать его и наброситься на него. Некоторые прыгающие пауки, такие как Phidippus audax, изображенные выше, даже украдут обед у других пауков (поведение, известное как клептопаразитизм).
Прыгающие пауки могут не создавать сети, но они все еще могут производить шелк, и им не нравится прыгать в пустоту без защитной веревки больше, чем вы. Прежде чем они прыгнут, они привязаются к себе, а затем выпустят больше шелка во время полета, так что, если они пропустят свою цель, они смогут поймать себя, а затем подняться обратно туда, откуда они начали. Несколько лет назад биологи пристально рассмотрели систему тросов пауков и поняли, что они использовали ее для контроля, а также для безопасности: выборочно применяя напряжение к их тросу безопасности, пауки могут контролировать свой шаг и следить за тем, чтобы они приземляются правой стороной вверх. Эта комбинация безопасности и контроля кажется довольно хорошей идеей, не так ли? Поэтому давайте научим роботов делать это тоже.
Первое, на что нужно обратить внимание, - это то, почему вы хотите использовать трос, когда что-то вроде хвоста отлично работает для стабилизации скачка. Есть несколько причин; одна из них - физическая безопасность, которую дает вам трос, поскольку она может остановить вас от бесконечного падения, если вы этого хотите. Но что более важно, системы, основанные на угловых импульсах, должны быть либо быстро движущимися, либо относительно массивными, либо обоими, в противном случае они работают не очень хорошо. Система привязки может быть очень маленькой и легкой, так как вам нужно только носить вокруг самого троса, а также очень маленький привод, который может зацепиться за него. Вам приходится иметь дело с самим модемом, и система имеет ограниченный срок службы, ограниченный количеством материала, который вы носите, но для ситуаций, когда размер и вес и энергопотребление важны, трос, вероятно, будет значительно больше эффективный.
Тщательное изучение прыгающих пауков (которое вы можете прочитать здесь) показало, что сразу после прыжка пауки начнут медленно вращаться назад. Чтобы компенсировать это, они используют внутренний тормоз трения на своем шелковом драглайне, чтобы дать себе немного вперед, качаясь, перевернув свое движение, чтобы иметь возможность приземляться примерно параллельно земле. Если вы настолько жестоки, что сокращаете свои драглайны, они будут продолжать вращаться назад и переминаться вверх дном.
Исследователи из Университета Кейптауна в Южной Африке построили робота под названием LEAP (Line-Equipped Autonomous Platform), чтобы узнать, могут ли они воспроизвести навыки прыгающего паука. LEAP [right] вряд ли напомнит вам даже немного о любом виде паука. На самом деле это всего лишь часть аппаратного обеспечения (в основном LEGO Technic), способного оказывать влияние в полете на несмываемую плетеная нейлоновую линию с использованием небольшого двигателя постоянного тока. Это даже не прыгающий робот, технически: это запущенный робот, выпущенный из катапульты. Фактическая прыгающая часть всего этого (по крайней мере прямо сейчас) не является значительной частью исследования, которое ориентировано на эффективность и контроль троса.
Spider-Inspired Jumping Robot
Так насколько хорошо это работает? Примерно так же, как и для паука, получается. Поддержание постоянного шага сложно, поэтому робот (и паук) используют периодическое торможение драглайна, чтобы изменить направление, в котором они качают, так что они приземляются должным образом. В зависимости от начальной скорости прыжка это может произойти один или два раза в течение прыжка, но в обоих случаях робот смог приземлиться правой стороной вверх, по крайней мере, до высоты тона. Работа с рулоном и рысканием немного сложнее, и эта конкретная версия робота не имеет активного контроля над этими осями, хотя исследователи предполагают, что другая версия робота с возможностью сгиба может добавить дополнительные оси управления через трос.
Будущие исследования будут работать над этим непланарным движением, а также экспериментировать с применением непостоянных сил на тросе с конечной целью внедрения стабилизации скачка в замкнутом контуре. Исследователи также исследуют альтернативные варианты использования троса, такие как замедление робота до того, как он приземлится, или обернуть плохих парней и повесить их с фонарных столбов, пока не появятся полицейские.
Автор статьи: Виктор Булавин
Похожие статьи:
 Soma начали принимать заказы на двухструнный инструмент DVINA
Soma начали принимать заказы на двухструнный инструмент DVINA

 Asus выпускает новые Chromebook для учеников школ
Asus выпускает новые Chromebook для учеников школ

 20 струнная гитара Djentar ставит новый рекорд
20 струнная гитара Djentar ставит новый рекорд

 Xiaomi игровой смартфон
Xiaomi игровой смартфон
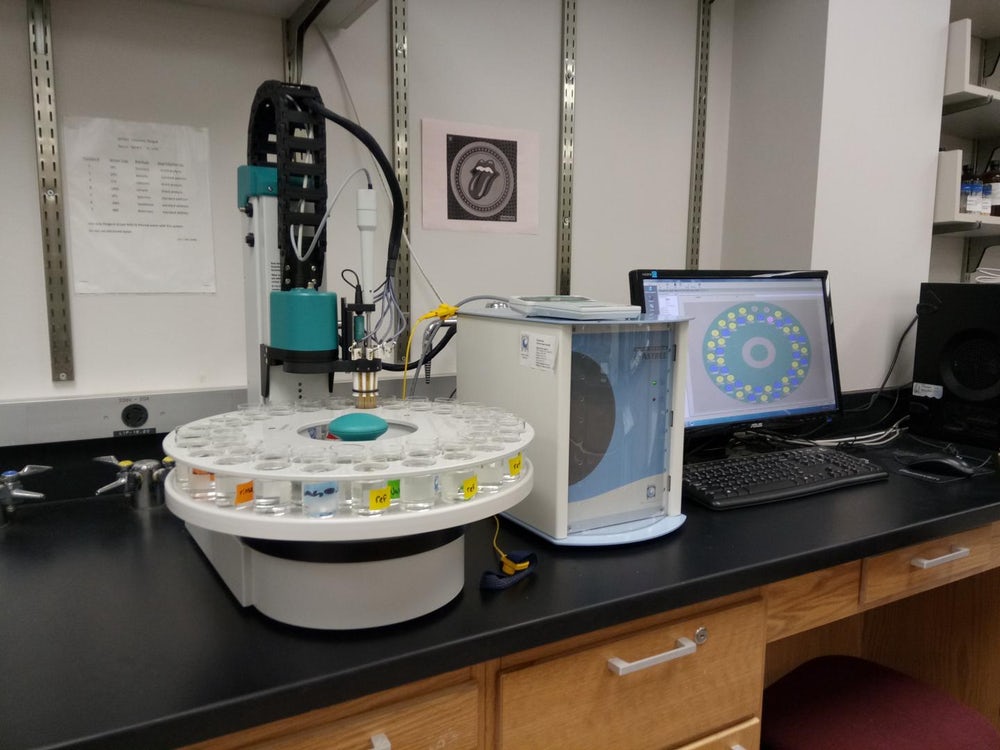 Электронный язык определяет специи на вкус
Электронный язык определяет специи на вкус

 Компьютер Asus All-in-One имеет беспроводную зарядку
Компьютер Asus All-in-One имеет беспроводную зарядку







