
- Главная
- >
- Роботы
- >
- Космические роботы в космосе
- >
- Для работы в условиях низкой гравитации предназначен робот Space Bok
Для работы в условиях низкой гравитации предназначен робот Space Bok
Спроектированный и построенный студентами из ETH Zurich и ZHAW Zurich, Space Bok, тестируемый в техническом центре ESTEC в Нидерландах ESA, предназначен для перемещения в условиях лунной гравитации

Мы видели роботов, которые могут ходить, бегать и даже делать сальто, но теперь студенческая команда работает над прототипом робота , который прыгает. Спроектированный и построенный студентами из ETH Zurich и ZHAW Zurich, Space Bok, тестируемый в техническом центре ESTEC в Нидерландах ESA, предназначен для перемещения в условиях лунной гравитации с помощью контролируемых границ в пространстве, где все четыре ноги отрываются от земли.
Немного истории
Когда миссия «Аполлон-11» приземлилась на Луну, одной из задач, поставленных Нилу Армстронгу и Баззу Олдрину, было научиться передвигаться по Луне. Хотя оба астронавта уже тренировались в условиях симулированной лунной гравитации, она не идет ни в какое сравнение с оригиналом, поэтому в рамках двух с половиной часов первого в истории лунного похода два человека провели удивительное количество времени для тренировок.
Астронавты обнаружили, что обычная ходьба в скафандре не очень практична при лунной гравитации, где можно легко прыгнуть на высоту 3 фута (1 м). Вместо этого они узнали, что могут очень быстро передвигаться, прыгая обеими ногами, как кенгуру. По словам швейцарской команды, Space Bok может прыгать на высоту до 2 м (6,6 фута) по вертикали на Луне, что означает, что он может двигаться с удивительной скоростью –словно лошадь, скачущая галопом.

Однако, когда четвероногий бегун движется, в момент,когда ноги теряют контакт с землей, стабильность становится проблемой, поскольку теперь это, по сути, крошечный космический корабль летящий по баллистической траектории. «Вместо статической ходьбы, когда по крайней мере три ноги постоянно находятся на земле, динамическая ходьба позволяет совершать походки с полными фазами полета, во время которых все ноги отрываются от земли», - говорит руководитель проекта Хендрик Колвенбах.
«Животные используют динамическую походку из-за её эффективности, но до недавнего времени вычислительная мощность и алгоритмы, необходимые для управления, затрудняли их реализацию на роботах.
В условиях низкой гравитации Луны, Марса или астероидов, это оказывается очень эффективным способом передвижения ". Как и его наземный африканский аналог, Space Bok использует ножки со встроенными пружинами, которые служат в качестве единиц накопления энергии для поглощения воздействия каждой посадки, а затем использует поглощенную силу для следующего прыжка. Кроме того, он оснащен специальным модулем, который позволяет ему ориентироваться так же, как спутник.
Результаты испытаний Space Bok
Пока что команде удалось заставить Space Bok совершать повторяющиеся прыжки на высоту до 4,3 фута (1,3 м) при моделируемой лунной гравитации. Они также создали испытательные центры, которые имитируют крайне низкую гравитацию астероидов, где робот будет проводить гораздо больше времени в полете. Для этого они использовали стенд ESA Orbital Robotics для интегрированных технологий (ORBIT) в лаборатории орбитальной робототехники и навигационной и контрольной лаборатории.
Описанная как самая ровная плоскость в Нидерландах, это эпоксидная поверхность размером 15,7 на 29,5 футов (4,8 на 9 м), окаймленная плоскими стенами идеально подходит для тестов. Команда взяла Space Bok и установила его на свободно плавающей платформе, чтобы робот мог прыгать со стены на стену, которая выполняла роль пола.

Во время движения робот активно использовал модуль, который позволял ему ориентироваться в пространстве и приземлятся на ноги. «Тестирование прошло достаточно хорошо, и мы даже использовали Space Bok для игр», - говорит Колвенбах. Более поздние тесты поместят Space Bok в окружение, которое будет включать в себя препятствия, холмистую местность и реалистичную почву, после чего последуют наружные испытания.
Автор статьи: Виктор Булавин
Похожие статьи:
 Модуль присоединяется к японским роботам на астероиде Рюгу
Модуль присоединяется к японским роботам на астероиде Рюгу

 Космические роботы покоряющие вершины и труднодоступные места
Космические роботы покоряющие вершины и труднодоступные места

 Появление роботизированных складов RiTS на МКС
Появление роботизированных складов RiTS на МКС

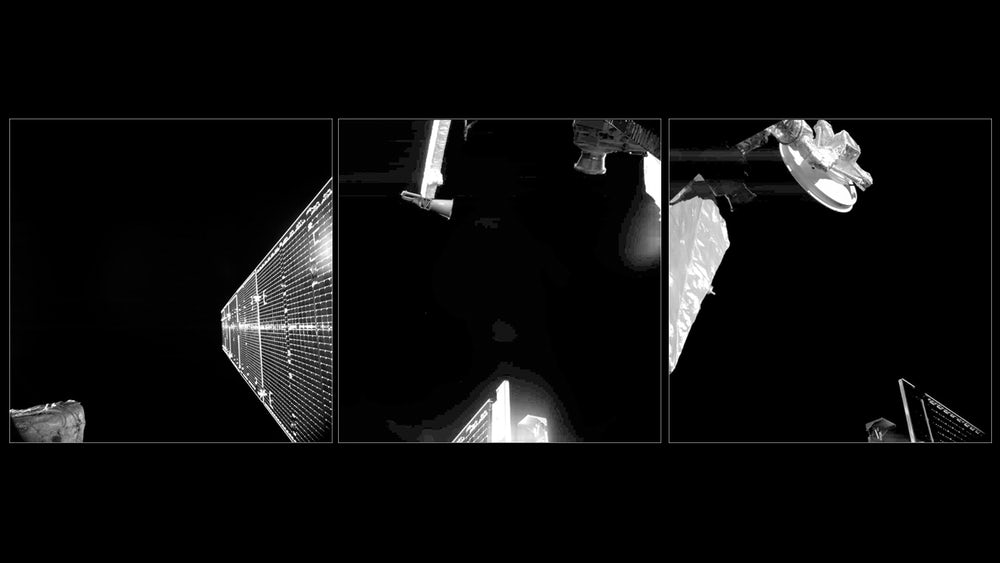 BepiColombo на пути к Меркурию: новый этап
BepiColombo на пути к Меркурию: новый этап

 Virgin Galactic достигнет космоса в своем следующем полете
Virgin Galactic достигнет космоса в своем следующем полете
 Беспилотник NASA завершает летные испытания
Беспилотник NASA завершает летные испытания







