
Движется как настоящий кальмар робот под именем Squidbot
Когда дело доходит до создания способов передвижения для роботов, ученые регулярно обращаются за вдохновением к миру природы, а морская среда является особенно богатым источником идей

Когда дело доходит до создания способов передвижения для роботов, ученые регулярно обращаются за вдохновением к миру природы, а морская среда является особенно богатым источником идей. Последним примером этого является высокоэффективный Squidbot, разработанный инженерами Калифорнийского университета (UC) в Сан-Диего, который использует комбинацию мягких и жестких материалов, чтобы двигаться под водой.
Принцип работы Squidbot
Робот команды, вдохновленный кальмарами, имеет форму бумажного фонаря и предназначен для хранения энергии внутри собственного тела и набора гибких ребер, когда он поглощает воду. Ребра прикреплены к паре круглых пластин на обоих концах корпуса, одно из которых втягивает окружающую воду через сопло, а второе выбрасывает ее по мере сжатия мягкого тела.
Это действие производит реактивные импульсы, которые перемещают робота по воде. По сути, это означает, что Squidbot может переносить свой источник энергии внутри своего тела, устраняя необходимость в привязи. Ученые, создавшие машину, считают, что это первое устройство такого типа.
Особенности Squidbot
«По сути, мы воссоздали все ключевые особенности, которые кальмары используют для высокоскоростного плавания», - говорит Майкл Т. Толли, профессор кафедры механической и аэрокосмической техники Калифорнийского университета в Сан-Диего. «Это первый непривязанный робот, который может генерировать реактивные импульсы для быстрого передвижения, как кальмар, и способен использовать их, изменяя форму своего тела, что повышает эффективность плавания».

Еще одно преимущество конструкции заключается в том, что вторая пластина может быть оснащена датчиком или камерой для выполнения задач подводного наблюдения. Мягкие роботы этого типа могут найти применение в проектах по исследованию окружающей среды, направленных на сохранение рыб и кораллов, которые в противном случае могли бы быть повреждены роботами с более жесткими телами. Робот был сначала испытан в особой зоне, а затем в большом аквариуме с другими существами. Squidbot перемещается со скоростью от 8 до 32 сантиметров в секунду (0,5 миль в час или 0,8 км / ч), что, по словам команды, быстрее, если сравнивать с другими мягкими роботами. Команда также показала, что роботом можно управлять, изменяя положение сопла. «После того, как мы смогли оптимизировать конструкцию робота, чтобы он мог плавать в аквариуме в лаборатории, было особенно интересно увидеть, что робот смог успешно плавать в большом аквариуме среди кораллов и рыб, продемонстрировав свою пригодность для реальных приложений», - говорит Калеб Кристиансон, руководивший исследованием. Вы можете увидеть Squidbot в видео ниже.
Автор статьи: Виктор Булавин
Похожие статьи:

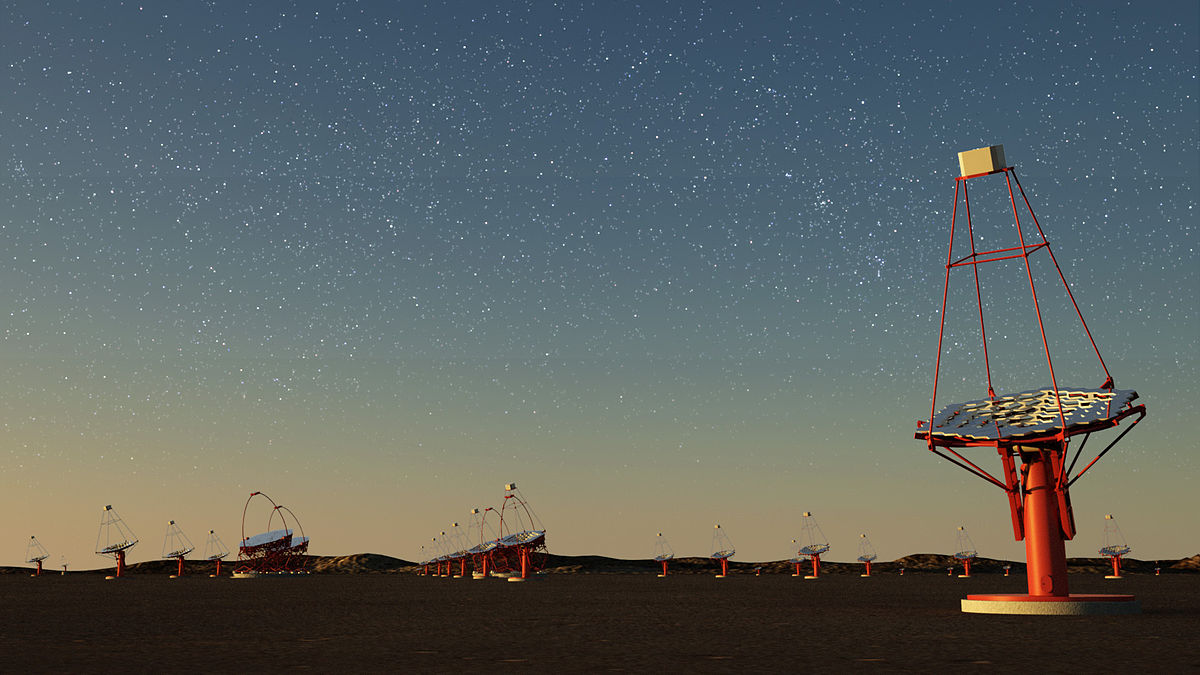 Первый в своем роде телескоп для гамма-астрономии
Первый в своем роде телескоп для гамма-астрономии
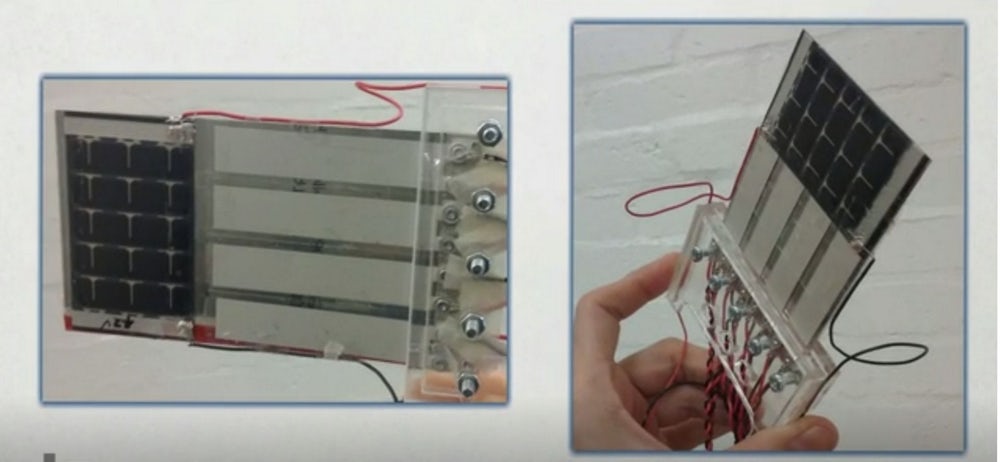 Исследователи создают флаги которые собирают энергию от солнца и ветра
Исследователи создают флаги которые собирают энергию от солнца и ветра

 Местоположение охранников на крупных мероприятиях отслеживает технология Fraunhofer
Местоположение охранников на крупных мероприятиях отслеживает технология Fraunhofer
 Влияние робототехники на образование
Влияние робототехники на образование
 Как помочь машинам ADEPT воспринимать некоторые законы физики
Как помочь машинам ADEPT воспринимать некоторые законы физики
 К созданию устойчивой квантовой электроники может привести новая сверхрешетка
К созданию устойчивой квантовой электроники может привести новая сверхрешетка







