

Как научить Вашего робота кормить Вас
По данным переписи 2010 года, около 1 миллиона взрослых в Соединенных Штатах нуждаются в ком-то, кто бы помог им есть. Это непростая и трудоемкая задача, решение которой вопрос необходимости
Важная и серьезная проблема
По данным переписи 2010 года, около 1 миллиона взрослых в Соединенных Штатах нуждаются в ком-то, кто бы помог им есть. Это непростая и трудоемкая задача, решение которой вопрос необходимости, а не выбора.
Исследователи из Вашингтонского университета работают над роботизированной системой, которая может помочь упростить эту задачу. Определив, какие продукты лежат в тарелке, робот может выработать стратегию использования вилки, чтобы взять и доставить желаемый кусочек в рот человека. Команда опубликовала свои результаты в серии статей.
Одна была недавно опубликована в журнале Института инженеров электротехники и электроники (IEEE Robotics and Automation Letters), а другая будет представлена на Международной конференции ACM/IEEE по взаимодействию человека и робота в Южной Корее.
«Необходимость быть зависимым от попечителя, просто чтобы поесть, лишает человека чувства независимости», - говорит автор разработки Сиддхартха Сриниваса (SiddharthaSrinivasa), профессор Боинг в Школе компьютерных наук и инженерии имени Пола Аллена в Вашингтонском университете.
Наша цель в этом проекте - дать людям немного больше контроля над своей жизнью». Идея состояла в том, чтобы разработать автономную систему кормления, которая будет прикрепляться к инвалидным коляскам людей и кормить людей всем, что они хотят есть.
«Когда мы начали проект, мы поняли: существует так много способов, которыми люди могут съесть кусок пищи в зависимости от его размера, формы или консистенции. Как нам начать? », - сказал соавтор Тапомаюк Бхаттачарджи (Tapomayukh Bhattacharjee), научный сотрудник постдокторантуры в школе Аллена. «Поэтому мы организовали эксперимент, чтобы увидеть, как люди едят обычные продукты, такие как виноград и морковь».
Как справляются с задачей люди
Исследователи расставили тарелки примерно с дюжиной разных видов пищи, начиная от твердой моркови до мягких бананов. На тарелках также были такие продукты, как помидоры и виноград, которые имеют жесткую кожу и мягкое содержимое.
Затем команда дала добровольцам вилку и попросила их взять разные кусочки пищи и скормить их манекену. Вилка содержала датчик, чтобы измерить, сколько люди прилагали силы, когда брали еду вилкой. Добровольцы использовали различные стратегии, чтобы взять еду с различной консистенцией.
Например, люди накалывали на вилку мягкие предметы, такие как бананы, под углом, чтобы они не соскользнули с нее. Для таких предметов, как морковь и виноград, добровольцы, как правило, использовали серии движений, чтобы увеличить силу и наколоть на вилку каждый кусочек.
Стратегия для роботов
«Люди, похоже, использовали разные стратегии не только в зависимости от размера и формы пищи, но и от того, насколько она жесткая или мягкая. Но нужно ли нам делать так же?» - спрашивает Бхаттачарджи.
«Мы решили провести эксперимент с роботом, в котором он накалывает еду, пока вилка не проникнет на определенную глубину, независимо от типа еды». Робот использовал одну и ту же стратегию грубой силы, чтобы попытаться собрать все кусочки пищи, независимо от их консистенции. Он мог подбирать твердую пищу, но ему плохо давалась мягкая пища и пища с жесткой кожей и мягким содержимым.
Таким образом, роботы, как и люди, должны регулировать то, какую силу и с какого угла ее прилагать, чтобы собирать разные виды пищи. Команда также отметила, что действия по накалыванию кусочка и кормлению не зависят друг от друга. Добровольцы часто специально поворачивали кусочек еды так, чтобы его можно было легче было взять и съесть. «Вы можете наколоть морковь на вилку, проткнув ее в самом центре, но человеку будет трудно есть», - сказал Бхаттачарджи.
«С другой стороны, если вы возьмете его на один из концов, а затем поднесете морковку ко рту, то так будет легче откусить». Чтобы разработать стратегию накалывания и кормления, которая меняется в зависимости от продукта питания, исследователи объединили два разных алгоритма. Сначала они использовали алгоритм распознавания RetinaNet, который сканирует тарелку, идентифицирует виды пищи на ней и размещает рамку вокруг каждого предмета.
Затем они разработали SPNet, алгоритм, который проверяет тип пищи в определенной рамке и сообщает роботу, как лучше всего подобрать еду. Например, SPNet говорит роботу наколоть на вилку клубнику или кусочек банана посередине, а морков в один из ее концов.
Команда заставила робота собирать кусочки пищи и кормить ими добровольцев, используя SPNet или более унифицированную стратегию: подход, при котором каждый кусочек еды накалывался в центре независимо от того, из чего он.
Различные стратегии SPNet выступили не хуже , чем и единый подход ко всем продуктам питания. «Многие инженерные проблемы не требуют такого отбора решений, но это исследование очень тесно связано с людьми», - сказал Сриниваса. «Если мы учтем, насколько легко человеку откусить кусочек, то люди не смогут использовать нашу систему.
Существует множество видов продуктов питания, поэтому наша самая большая задача - разработать стратегии, которые могли бы справиться со всеми из них». В настоящее время группа сотрудничает с Центром доступных технологий Taskar (Taskar Centerfor Accessible Technology), чтобы получить обратную связь от лиц, осуществляющих уход, и пациентов в специализированных учреждениях, о том, как улучшить систему для полного соответствия нуждам людей.
«В конечном итоге наша цель состоит в том, чтобы наш робот помогал людям обедать или ужинать самостоятельно», - говорит Шриниваса. «Но дело не в том, чтобы заменить попечителей: мы хотим расширить их возможности. С помощью робота медицинский работник может всего лишь установить тарелку, а затем делать что-то еще, пока человек ест». Соавторами первой статьи являются докторант Гилву Ли (GilwooLee) и ученый-исследователь Ханджун Сонг (HanjunSong), оба из школы Аллена.
Соавторами второго доклада являются Дэниел Галленбергер (Daniel Gallenberger), студент магистратуры TechnischeUniversitätMünchen в Германии, который завершил это исследование в Вашингтонском университете, и Йонгсун Ким (YoungsunKim), научный сотрудник школы Аллена. Эта работа была впервые представлена на недавней конференции NeurIPS, где она получила награду как лучшая демонстрация.
Автор статьи: Виктор Булавин
Похожие статьи:

 Облегчают создание современных материалов роботы и специализированное ПО
Облегчают создание современных материалов роботы и специализированное ПО

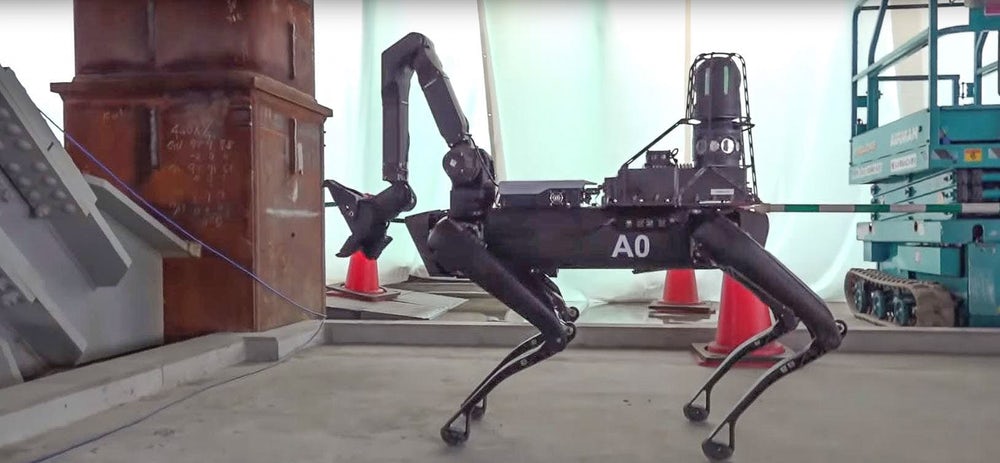 Boston Dynamics дает Spot роботу работать на стройке
Boston Dynamics дает Spot роботу работать на стройке

 Отслеживает охранников на крупных мероприятиях технология Fraunhofer
Отслеживает охранников на крупных мероприятиях технология Fraunhofer

 Спецслужбы США ищут технологии для выявления смертельных химикатов
Спецслужбы США ищут технологии для выявления смертельных химикатов

 Способна выдержать 500 циклов перезарядки первая полностью перезаряжаемая углекислотная батарея
Способна выдержать 500 циклов перезарядки первая полностью перезаряжаемая углекислотная батарея

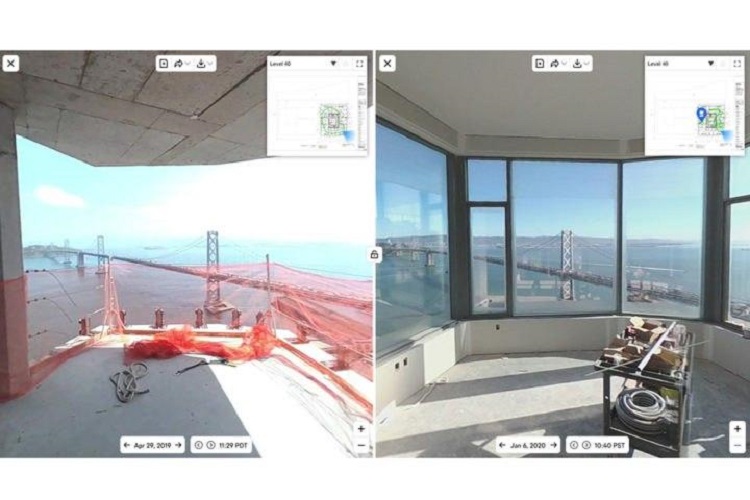 Cтроительные проекты и их перенос в цифровой мир
Cтроительные проекты и их перенос в цифровой мир







