
Операционная система для роботов ROS
Операционная система дял роботов ROS (Robot Operating System). 10 популярных роботов на основе ROS на протяжении многих лет и этапы их развития в мире робототехники.
Операционная система для роботов ROS (Robot Operating System). 10 популярных роботов на основе ROS на протяжении многих лет. ROS представляет собой набор программных инструментов и библиотек, используемых программистами-роботами для разработки приложений.

Рост сообщества с открытым исходным кодом был довольно поразительным. Вот выдержка из блога дня рождения ROS:
«В эту дату в 2007 году первая сделка была совершена в проекте ROS на SourceForge. С тех пор ROS выросла с первого публичного обязательства до более чем 200 000 сборов, сделанных более чем 2800 человек со всего Мира. Эти взносы составили более 4,5 млн. Значимых строк кода, которые, следуя стандартным оценкам по оценке развития, займут 169 разработчиков в полном объеме 8,5 лет».
Разумеется, ROS будет продолжать разрабатывать и помогать создавать новые роботы и приложения. Но мы думали, что было хорошо взглянув на 10 незабываемых роботов, которые используют ROS. Есть куча замечательных роботов, которые не составляли наш список, поэтому, пожалуйста, поделитесь своими мыслями с нами в комментариях.
Робот искусственного интеллекта STanford (STAIR)
STAIR технически не использовал ROS, но STAIR был там, где все началось в 2006 году. Исследовательская платформа для мобильных манипуляций Стэнфордского университета была построена на предшественнике ROS. STAIR был разработан, чтобы ориентироваться в домашней и офисной среде, подбирать и взаимодействовать с объектами и инструментами, а также интеллектуально взаимодействовать с людьми в этих средах и помогать им.
В STAIR 1 была представлена Neuronics Katana Arm, основа Segway и массив, в который входили пользовательский лазерный сканер, лазерный дальномер Hokuyo, Axis PTZ и другие. По словам его создателей, STAIR был построен с использованием «методов из всех областей ИИ, включая машинное обучение, видение, навигация, манипуляции, планирование, рассуждение и речевую / естественную обработку языка. Это в отличие от 30-летней тенденции работы над фрагментированными подполями AI и станет средством для исследования исследований в отношении истинного интегрированного ИИ».
Персональный робот 2 (PR2)
PR2 - это платформа для исследований и разработок робототехники, созданная Willow Garage. PR2, который был сначала продан в учреждения в 2010 году за 400 000 долларов США, состоял из всенаправленного подхода, оснащенного двумя 7-DOF оружием с грузом 1,8 килограмма. PR2 также имел два бортовых сервера, LIDAR, блок измерения инерции и другие устройства.
Там есть куча видеороликов PR2, но ниже - один из наших фаворитов. «PR2 не будет толкать вас в пул-залах в ближайшее время», - отметили в 2010 году в команде, но это было довольно долгое достижение.
Rethink Robotics Baxter
Введенный в 2012 году совместный робот Baxter стал первым коммерческим роботом, который использовал ROS. И с тех пор это максимизация эффективности и снижение издержек как на производственных, так и на производственных объектах. Вот весело видео с 2013 года о кофе-баре Baxter с Keurig.
Robonaut 2
Возможно, самый крутой из всех роботов на основе ROS, Robonaut 2 (R2) был разработан в партнерстве между NASA и General Motors, разработанным для того, чтобы увидеть, как манипулирующие роботы ведут себя в космосе. R2 был вдохновением для робота NASA Valkyrie, который также называется R5.
Savioke Relay
Стив Кузенс, основатель и главный исполнительный директор Savioke, был одним из крупнейших сторонников движения робототехники с открытым исходным кодом. До основания Savioke, Cousins был президентом и генеральным директором Willow Garage, наблюдая за ROS, PR2 и TurtleBot. Поэтому неудивительно, что автономный робот-ретранслятор Savioke Relay построен на ROS.
Основанная в 2013 году, Savioke изначально выкатила Relay в элитных отелях, доставляющих товары гостям, но недавно она начала свой путь в роскошные жилые комплексы, логистические и производственные фирмы и больницы. Savioke также недавно объявила, что начинает пилот с курортами Walt Disney World.
Fetch робот
Компания RBR50 Fetch Robotics также имеет тесные связи с ROS. Мелони Мудрый (CEO), Майкл Фергюсон (CTO), Дэвид Робсон (начальник штаба) и другие, все проводили время в Willow Garage, работающем в ROS. Поэтому, опять же, не удивительно, что Fetch основал свои роботы на ROS. Вот видеоролик Fetch-роботов, работающих в DHL-партнере Wärtsilä.
TurtleBot
TurtleBot - это недорогой набор персональных роботов, в котором используется ROS. TurtleBot был создан в Willow Garage от Wise и Tully Foote в ноябре 2010 года. С TurtleBot вы сможете построить робота, который может двигаться вокруг вашего дома, видеть в 3D и иметь достаточную мощность для создания захватывающих приложений. TurtleBot 3 был представлен ранее в 2017 году.
Atlas, DRC Version
Из 23 команд, которые участвовали в финале DARPA Robotics Challenge в 2015 году, 18 использовали ROS, чтобы помочь запустить своих роботов.
Автономный автомобиль Marvin
Были и другие автономные автомобили, которые управляли ROS, но Marvin из Техасского университета в Остине был первым. Измененный 1999 Isuzu VehiCross соревновался в 2007 DARPA Urban Challenge, но это была одна из пяти команд, которые не завершили гонку. Однако он смог выполнить многие из трудных задач, включая слияние, разворот, пересечение и парковку.
Clearpath Robotics Grizzly
Введенный в 2013 году, Grizzly разработан для исследований в области сельского хозяйства, горнодобывающей и оборонной робототехники. Grizzly - это роботизированная платформа размера ATV, построенная так, чтобы работать как трактор с точностью промышленного робота. Он может вытащить плуг, нести массовую полезную нагрузку 600 кг. и установить широкий ассортимент стандартных аксессуаров для служебных автомобилей.
Вот видео 2015 года Grizzly, буксирующего самолет.
Автор статьи: Виктор Булавин
Похожие статьи:
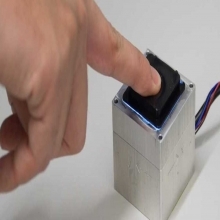
 Позволит роботу регулировать силу захвата сенсорная кожа
Позволит роботу регулировать силу захвата сенсорная кожа

 Признаки внеземной жизни может помочь обнаружить это новое устройство
Признаки внеземной жизни может помочь обнаружить это новое устройство

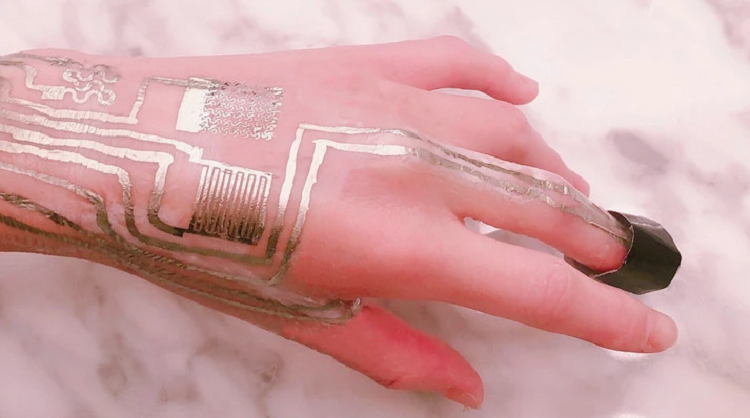 Можно наносить прямо на кожу специальные новые датчики
Можно наносить прямо на кожу специальные новые датчики
 Поможет защитить нашу планету от загрязнения пластиком использование шаровой мельницы
Поможет защитить нашу планету от загрязнения пластиком использование шаровой мельницы

 RoboBusiness Europe 2018
RoboBusiness Europe 2018

 Создавать большие объекты на 3D-принтере позволяет вспенивающаяся смола
Создавать большие объекты на 3D-принтере позволяет вспенивающаяся смола







