
- Главная
- >
- Роботы
- >
- Медицинские роботы
- >
- По структуре схожей с кровеносной системой батареей питается Робо-рыба
По структуре схожей с кровеносной системой батареей питается Робо-рыба
Команда инженеров из Cornell's Organic Robotics Lab создала робота-крылатку с мягким телом, питаемую электрической кровью, которая не только служит источником энергии

Команда инженеров из Cornell's Organic Robotics Lab создала робота-крылатку с мягким телом, питаемую электрической кровью, которая не только служит источником энергии, но и гидравлически действует для создания движителя.
Этот биологически вдохновленный подходрешает одну из самых больших проблем для маленьких, неуправляемых роботов – отношение массы и мощности. Батареи добавляют значительный вес роботам, и этот вес влияет на дальность, маневренность, скорость и размеры.
Таким образом, если инженеры могут накапливать энергию в компоненте, который также служит вторичной цели, то это значительно уменьшает вес робота.
О роботе
Разработанная соавтором исследования Джеймсом Пикулом, бывшим докторантом (ныне доцентом в Университете Пенсильвании), роботизированная крылатка достигает в длину 40 см (16 дюймов) и сделана из формованного кремния.

Под корпусом находятся два гидравлических насоса, каждый из которых приводится в действие взаимосвязанными проточно-цинковыми батареями. Один насос двигает хвост, перемещая жидкость от одной стороны хвоста к другой, в то время как другой насос перекачивает жидкость, хранящуюся в спинных плавниках, в соответствующие грудные плавники.
Это все происходит не так уж и быстро. В настоящее время он плавает со скоростью в полторы длины тела робота за минуту, но это лишь первые дни существования проекта.
Особенность метода
Гидравлика в роботах с мягким телом не новая идея, но задача гидравлической жидкости - это дополнительная работа по снабжению энергией. Используя жидкость (раствор электролита, называемый кровью робота) в качестве источника электрической и механической энергии, масса робота в форме рыбы значительно уменьшается, увеличивая рациональность использования энергии.
Это означает, что робот может плавать в автономном режиме в течение 36 часов, прежде чем потребуется перезарядка. «В природе мы видим, как долго организмы могут функционировать, выполняя сложные задачи», - говорит Роб Шепард, доцент кафедры машиностроения и аэрокосмической техники. «Роботы не могут выполнять подобные действия очень долго. Наш подход может значительно увеличить рациональность использования энергии, позволяя мягким роботам оставаться в работоспособном состоянии гораздо дольше».
Гибридная батарея / гидравлическая синтетическая сосудистая система моделировалась как окислительно-восстановительная батарей. Хотя эта форма батареи не особенно мощная по сравнению, скажем, с литий-ионными батареями, она имеет преимущество в том, что ее можно втиснуть практически в любое пространство или форму.

Эта гибкость может быть особенно полезна при разработке роботов для конкретных задач или для навигации в труднодоступных местах, поскольку традиционные батареи могут чрезмерно влиять на физические пропорции конструкции, ограничивая ее объем. «Мы хотим собрать как можно больше компонентов в роботе и превратить их в энергетическую систему», - говорит Шепард. «Если у вас уже есть гидравлические жидкости в вашем роботе, вы можете использовать большие запасы энергии и дать роботам больше времени для автономной работы».
Подобные разработки знаменуют собой еще один шаг к созданию более совершенных и эффективных автономных водных роботов. Потенциал для морской разведки, инспекции трубопроводов и подводных кабелей и т.п. огромен. Что касается гибких роботов с мягким телом, они могут играть важную роль в деликатных средах, таких как коралловые рифы, где использование робота с твердым телом может быть слишком рискованным.
Автор статьи: Виктор Булавин
Похожие статьи:

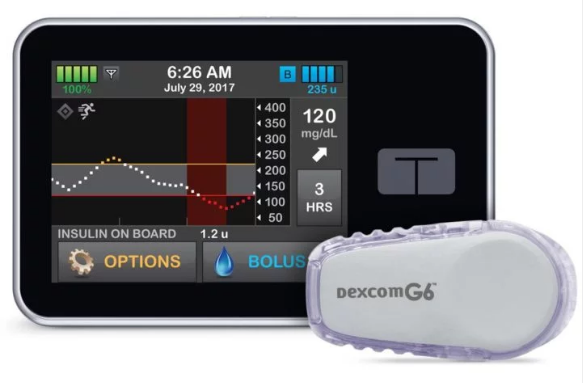 Созданная искусственно поджелудочная железа лучше контролирует уровень глюкозы в крови чем современные технологии
Созданная искусственно поджелудочная железа лучше контролирует уровень глюкозы в крови чем современные технологии

 Welwalk WW-2000, новый робот от Toyota
Welwalk WW-2000, новый робот от Toyota

 Робот массажист Emma
Робот массажист Emma

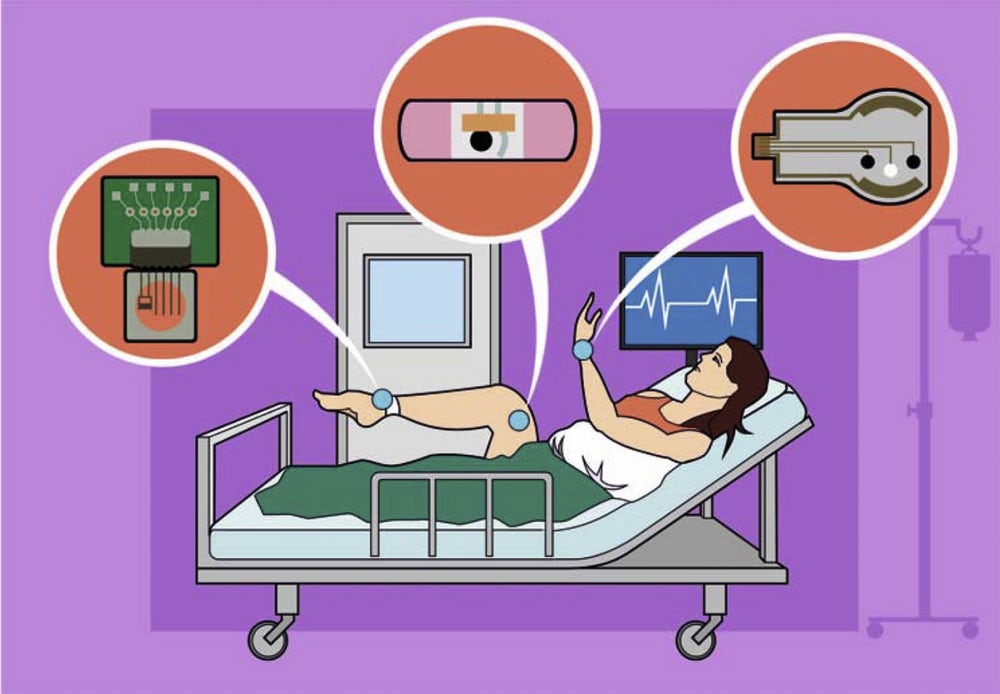 Многоцелевые электрохимические датчики - это будущее фитнеса и медицинских носимых изделий
Многоцелевые электрохимические датчики - это будущее фитнеса и медицинских носимых изделий

 Реабилитационный робот
Реабилитационный робот

 Diligent Robotics
Diligent Robotics







