
- Главная
- >
- Дроны и беспилотные летательные аппараты
- >
- Повреждённым дронам функционировать с тремя пропеллерами позволит использование бортовых камер
Повреждённым дронам функционировать с тремя пропеллерами позволит использование бортовых камер
Если у квадрокоптера отказывает один из двигателей, то он, соответственно, начинает падать. Однако благодаря новым исследованиям такие беспилотные летательные аппараты вскоре смогут

Если у квадрокоптера отказывает один из двигателей, то он, соответственно, начинает падать. Однако благодаря новым исследованиям такие беспилотные летательные аппараты вскоре смогут не только оставаться в воздухе, но и долетать до точки назначения по новой технологии .
Недостатки GPS систем современных квадрокоптеров
Обычно, когда один из четырех двигателей квадрокоптера перестает работать, дрон начинает неконтролируемо вращаться, теряя ориентацию в трехмерном пространстве. И хотя существуют системы, которые используют данные GPS, чтобы помочь восстановить эту ориентацию, сигналы GPS не всегда доступны, особенно если дрон находится в помещении.
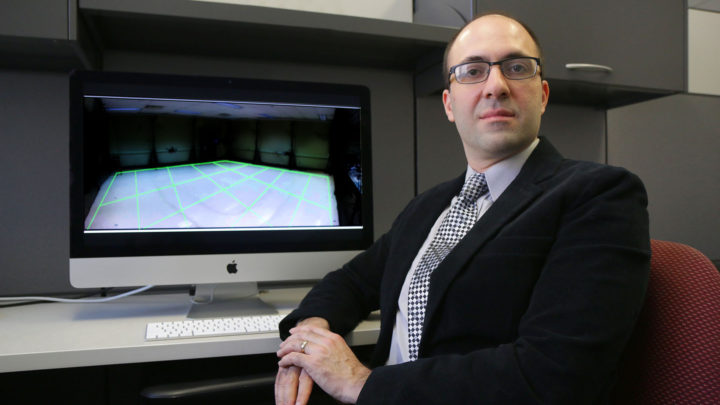
В поисках альтернативы ученые из Цюрихского университета и Технологического университета Делфта в Нидерландах оснастили небольшой квадрокоптер двумя крошечными бортовыми камерами. Первая – обычная оптическая камера, а вторая – событийная, главной особенностью которой является запись видео только в случае возникновения каких-либо событий.
Как работает новый алгоритм
Когда дрон начинал вращаться после того, как один из его пропеллеров был удален, использовались специальные алгоритмы для выполнения анализа выходных сигналов двух камер в реальном времени. Отслеживая, как местоположение конкретных визуальных ориентиров менялось от одного кадра видео к другому, эти алгоритмы смогли вычислить, как менялось местоположение устройства.
Таким образом, дрон смог определить свое положение в пространстве, и был способен даже долететь до точки назначения используя заранее запрограммированную траекторию полета. Когда оптическая камера использовалась отдельно, записанное видео выходило слишком размытым в условиях низкой освещенности, что приводило к сбою квадрокоптера.
Однако добавление более чувствительной камеры позволило получить достаточно визуальных данных, чтобы дрон мог летать даже при тусклом освещении. Статья об исследовании была недавно опубликована в журнале IEEE Robotics and Automation Letters. Процесс тестирования технологии можно увидеть в видео ниже. Ранее разработанная система, созданная в исследовательском институте ETH Zurich, позволяет квадрокоптерам безопасно приземляться, даже если три двигателя устройства будут отключены.
Автор статьи: Виктор Булавин
Похожие статьи:

 Первый в истории закрытый беспилотный надзор
Первый в истории закрытый беспилотный надзор

 Разработана система противодроновой защиты для обычных автомобилей Drone Sentry-X
Разработана система противодроновой защиты для обычных автомобилей Drone Sentry-X

 Тушат огонь с помощью дронов - Hover Games Challenge 1
Тушат огонь с помощью дронов - Hover Games Challenge 1

 До того как действующий парк дронов станет реальностью нужно преодолеть препятствия
До того как действующий парк дронов станет реальностью нужно преодолеть препятствия
 Соучредитель Oculus представил дрона Interceptor который должен бороться с беспилотниками
Соучредитель Oculus представил дрона Interceptor который должен бороться с беспилотниками

 Один беспилотник из этой системы дронов xFold способен поднимать объекты весом до 1000 фунтов
Один беспилотник из этой системы дронов xFold способен поднимать объекты весом до 1000 фунтов







