
Позволит роботу регулировать силу захвата сенсорная кожа
Прототип состоит из силиконовой кожи с цветными шариками и камеры, направленной вверх. Когда кожа вступает в контакт с объектом, структура шариков меняется, и это улавливается камерой

Когда мы подбираем объект, мы можем регулировать силу сжатия, если этот объект является хрупким либо скользким, и мы можем использовать тактильные ощущения, чтобы определить, нуждается ли объект в деликатном подходе при использовании. Исследователи ETH разработали датчик, который может помочь роботизированным захватам сделать то же самое.
Принцип работы
Прототип состоит из силиконовой кожи с цветными шариками и камеры, направленной вверх. Когда кожа вступает в контакт с объектом, структура шариков меняется, и это улавливается камерой.
Исследователи провели множество экспериментов чтобы обеспечить максимально точный контроль контакта с датчиком, включая изменение размера объекта, его расположения в зоне датчика и приложенной силы.
Затем было предложено использовать машинное обучение, чтобы помочь сопоставить различные типы и уровни контакта с зарегистрированными изменениями структуры шаров и обучить сенсорную систему точно регистрировать силу, приложенную с использованием экспериментального набора данных.
«Обычные датчики регистрируют приложенное усилие только в одной точке», - сказал докторант Карло Сферрацца. «Напротив, наш роботизированный корпус позволяет нам различать несколько точек соприкосновения, действующих на поверхность сенсора, и вычислять их с высокой степенью разрешения и точности. Мы даже можем определить направление, в котором действует сила».
Будущее новой технологии
Команда говорит, что такая система должна быть довольно недорогой в производстве, и видит потенциал в том, чтобы дать роботам возможность адаптировать силу захвата, например, на основе обрабатываемого объекта, и вносить коррективы на лету.
Система также может использоваться спортсменами для измерения уровня силы, прикладываемой к педалям велосипеда или кроссовкам. У технологии также может быть будущее в сфере виртуальной реальности, чтобы предоставить игрокам тактильную обратную связь.
На данный момент прототип имеет размеры всего 5х5 см (1,96 х 1,96 дюйма) и толщину 1,7 см (0,66 дюйма). Исследователи работают над расширением системы для охвата большей площади поверхности, контролируемой несколькими камерами, а также стремятся уменьшить толщину датчика. Документ о проекте был опубликован в IEEE Access. В видео ниже можно получить больше информации.
Автор статьи: Виктор Булавин
Похожие статьи:

 Учат роботов тому что необходимо людям исследователи
Учат роботов тому что необходимо людям исследователи
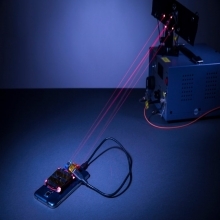
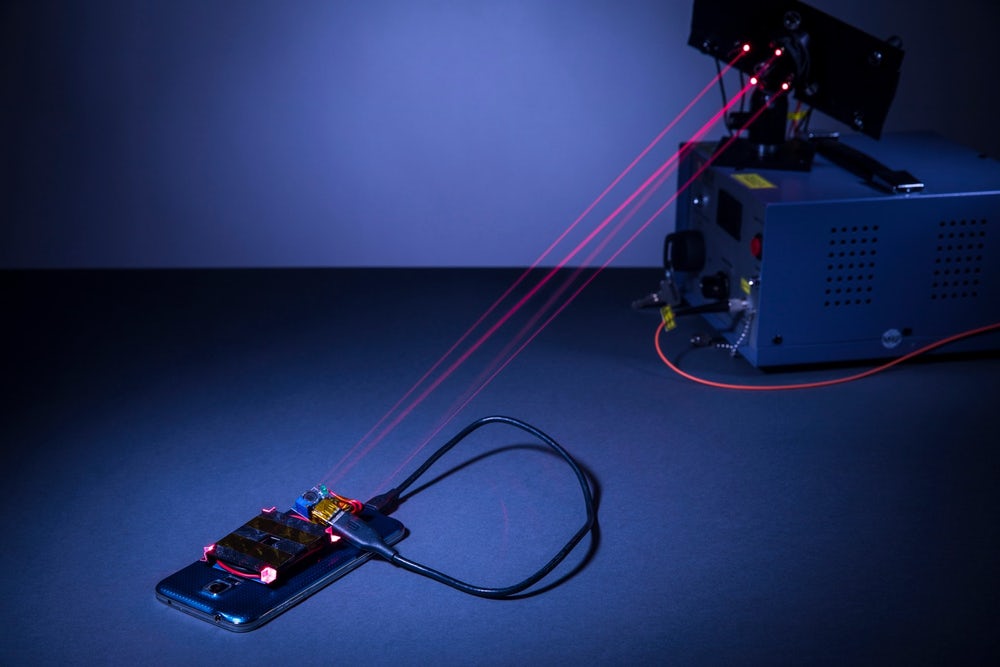 Лазерная система заряжает беспроводные телефоны по всей комнате
Лазерная система заряжает беспроводные телефоны по всей комнате

 Робот-инспектор Vortex успешно обследует самолет Boeing-737
Робот-инспектор Vortex успешно обследует самолет Boeing-737

 Навыкам мытья рук в Индии обучает детей робот Pepe
Навыкам мытья рук в Индии обучает детей робот Pepe

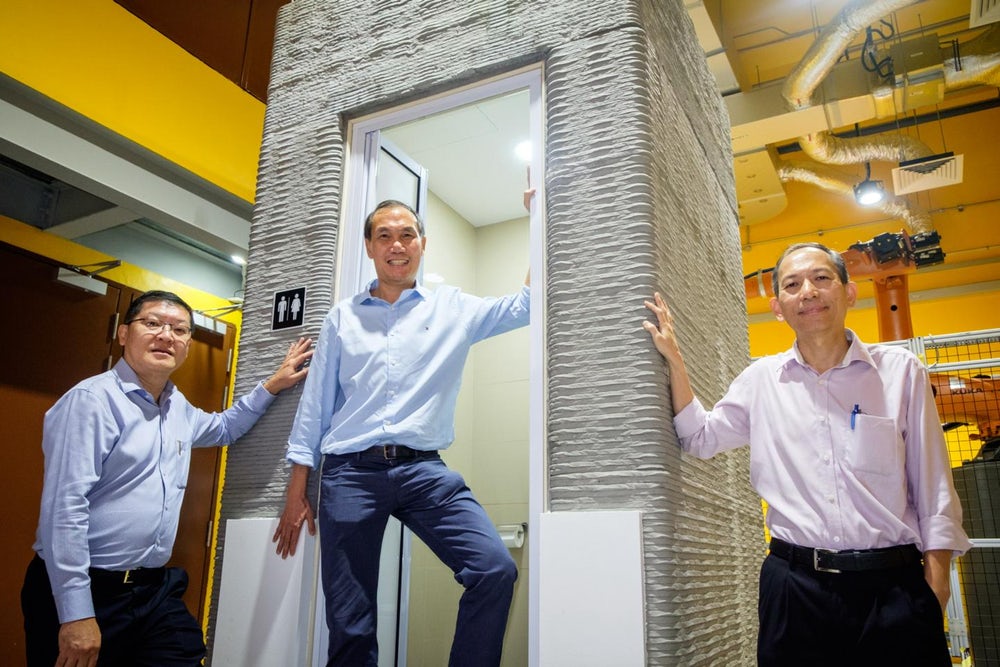 Cоздается за один день ванная комната с помощью 3D-печатью
Cоздается за один день ванная комната с помощью 3D-печатью

 Патрулирующий робот ANYmal C
Патрулирующий робот ANYmal C








Константин:
02 Apr 2020г. в 09:50
Конечно, усилие, прикладываемое к объекту, можно контролировать и программным способом, когда программист задает усилие с которым необходимо удерживать конкретный предмет, а робот распознает предметы и выполняет инструкцию по удержанию. Однако, данная "кожа", за счет множества датчиков, позволит выполнять подобные команды гораздо точнее, а значит сможет деликатно манипулировать хрупким предметами и это здорово.