
- Главная
- >
- Новые технологии в Мире
- >
- Новые электронные технологии
- >
- Вакуумный захват использует искусственную мышцу вместо воздуха
Вакуумный захват использует искусственную мышцу вместо воздуха
Роботы, такие как используемые на заводах, часто оснащены вакуумными захватами, для размещения на плоских объектах. Как правило, эти захваты питаются от сжатого воздуха, что имеет некоторые недостатки. Теперь, однако, ученые разработали тот, который вместо этого использует искусственную мышцу.

Современные тенденции захвата
Роботы, такие как используемые на заводах, часто оснащены вакуумными захватами, для размещения на плоских объектах. Как правило, эти захваты питаются от сжатого воздуха, что имеет некоторые недостатки. Теперь, однако, ученые разработали тот, который вместо этого использует искусственную мышцу.
Проблемы с вакуумными захватами с воздушным питанием включают факты, что требуемые компрессоры являются шумными, они используют много энергии, плюс они большие и громоздкие. Вот тут и появляется новый захват.
Разработанная командой из Саарландского университета Германии под руководством профессора Стефана Зелеке, она включает в себя пучки сверхмелкообразных проводов памяти. Расположенные по кругу, эти пучки прикреплены к одной стороне тонкого металлического диска, который может выскакивать вверх или вниз, идти вогнутым или выпуклым. Диск, в свою очередь, прикреплен к круглой резиновой мембране с другой стороны, для формирования уплотнения на плоских поверхностях.
Когда электрический ток проходит через провода из никель-титанового сплава, они нагреваются. Это приводит к тому, что их внутренняя структура, подобная решетке, изменяется таким образом, что они временно становятся короче. Когда этот ток прекращается, они мгновенно остывают и возвращаются в свою более длинную форму.
Таким образом, они действуют как мышечные волокна, которые сжимаются и расслабляются, причем круг пучков проводов действует как одна полная мышца. Включая и выключая электрический ток, который течет к этой мышце, он либо сжимается, либо расслабляется. Это заставляет металлический диск всплывать или всплывать, создавая вакуум внутри резиновой мембраны или высвобождая его.
Достоинства
Полученное прототипное устройство является легким, недорогим для построения, бесшумно работает, использует относительно мало электроэнергии и может поднимать и удерживать объекты весом в несколько килограммов - технология масштабируема, однако, поэтому более тяжелые объекты можно было бы снять, включив в них больше проводов.
Кроме того, контролируя электрическое сопротивление проводов и определяя степень их деформации, возможно, что блок управления может определить, поддерживается ли вакуум, поэтому он может выдавать предупреждения, если он чувствует, что объект не является безопасно.
В настоящее время университет ищет промышленных партнеров, чтобы помочь в развитии этой технологии на коммерческой основе.
Автор статьи: Виктор Булавин
Похожие статьи:

 Возможно никогда не потребуется заряжать наушники JBL работающие на солнечных батареях
Возможно никогда не потребуется заряжать наушники JBL работающие на солнечных батареях

 Последний мини-компьютер от Asus не такой уж и маленький
Последний мини-компьютер от Asus не такой уж и маленький

 Samsung продемонстрировали новый ноутбук Galaxy Book 2-в-1
Samsung продемонстрировали новый ноутбук Galaxy Book 2-в-1

 Расслабьтесь с этим новым и недорогим и качественным массажером
Расслабьтесь с этим новым и недорогим и качественным массажером
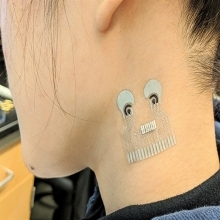
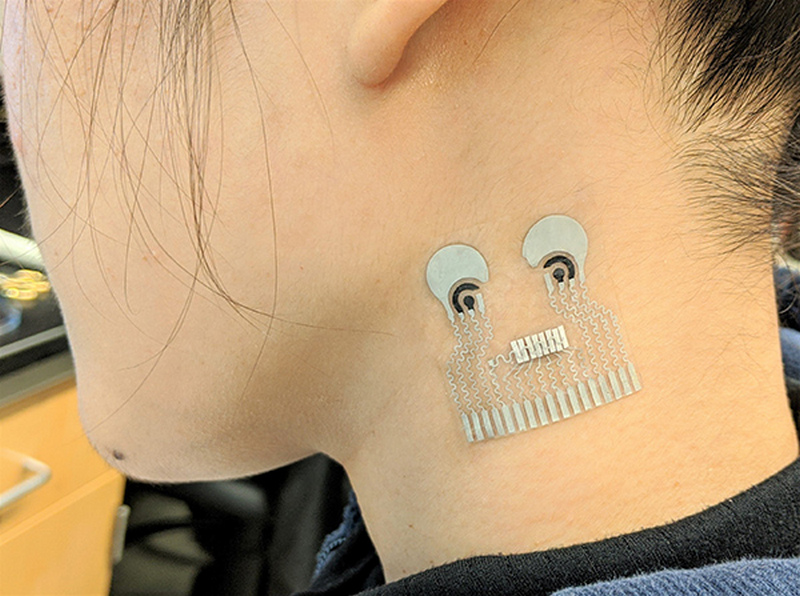 Датчик артериального давления
Датчик артериального давления
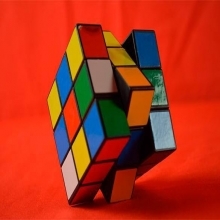
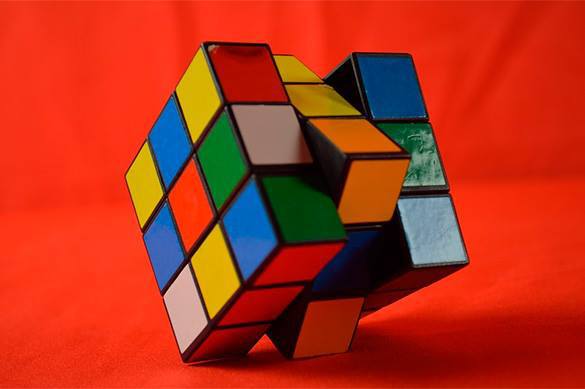 Cамосборный кубик-рубика сделали ученные в Японии
Cамосборный кубик-рубика сделали ученные в Японии







