
- Главная
- >
- Новости
- >
- Созданный на основе Raspberry Pi и вдохновленный устройством Boston Dynamics новый робот Spot Micro
Созданный на основе Raspberry Pi и вдохновленный устройством Boston Dynamics новый робот Spot Micro
Это шагающий четвероногий робот Spot Micro, работающий на Raspberry Pi 3B. Создавая этот проект, человек под ником redditor/thetrueonion хотел научиться разработке программного обеспечения

Это шагающий четвероногий робот Spot Micro, работающий на Raspberry Pi 3B. Создавая этот проект, человек под ником redditor/thetrueonion (он же Майк) хотел научиться разработке программного обеспечения для роботов на C++ и Python, научить робота ходить, регулировать скорость передвижения и направление.
Майка вдохновил Spot, один из роботов Boston Dynamics, разработанный для промышленного использования.
Из чего сделано новое устройство?
- Raspberry Pi 3B
- Плата сервоуправления: PCA9685, управление через I2C
- Сервоприводы: 12 × PDI-HV5523MG
- ЖК-панель 16 × 2 I2C
- Аккумулятор: 2 с, 4000 мАч, LiPo, прямое подключение к силовым сервоприводам
- UBEC: HKU5 5V / 5A ubec, используется как регулятор напряжения 5V для питания Raspberry Pi, ЖК-панели, платы управления PCA9685
- Точечная микро-рамка Thingiverse, изготовленная на 3D-принтере
Как ходит этот робот?
Мини-бот «Spot Micro» способен регулировать свое положение в пространстве и выполнять такие команды, как «походка рысью» или «обычная походка». Первая команда - это четырехэтапная походка с симметричным движением двух ног за раз (как лошадь рысью). Последний представляет собой восьмифазную походку с изменением положения одной ногой за раз и смещением тела для равновесия (как при ходьбе человека).
В этом подробном пошаговом руководстве Майк раскрывает, как они заставили робота ходить, вплоть до порядка подключения сервоприводов к плате управления PCA9685. И да, это один из тех волшебных проектов, где весь необходимый вам код хранится на GitHub. Программное обеспечение реализовано на Raspberry Pi 3B под управлением Ubuntu 16.04. Программный код написан на C ++ и Python в среде ROS.
Что дальше?
Майк еще не закончил: он хочет улучшить своего робота, добавив лидар, чтобы получить простое двухмерное отображение комнаты. Также в списке идей находится разработка автономного модуля планирования движения, который поможет роботу выполнять простые задачи в воспринимаемой 2D-среде. И, наконец, добавление камеры для проведения базовой классификации изображений.
Автор статьи: Виктор Булавин
Похожие статьи:
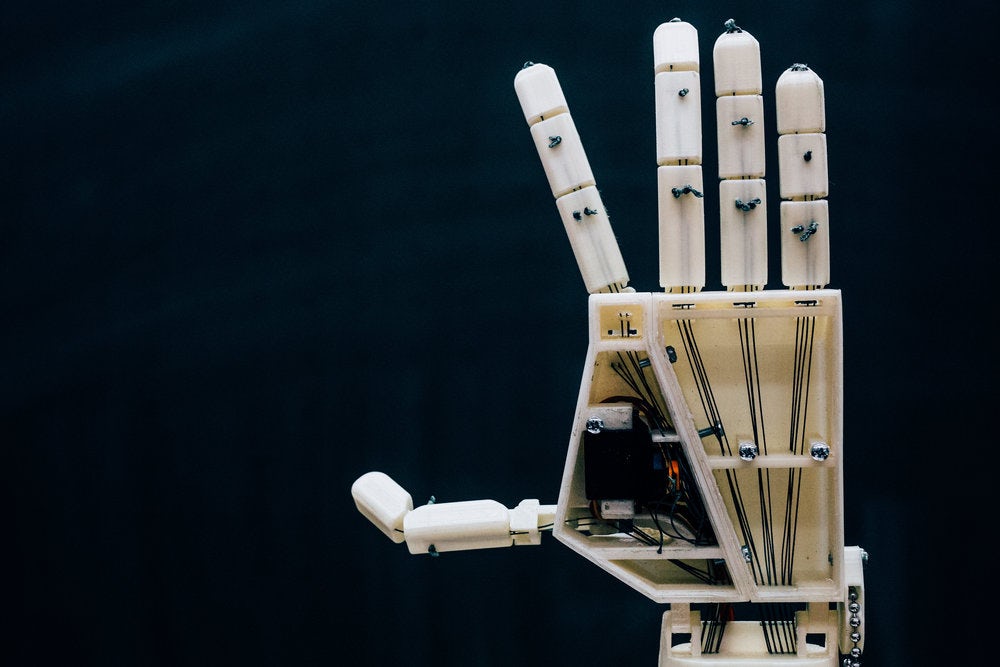 3D-печатаемый робот-манипулятор интерпретирует язык жестов
3D-печатаемый робот-манипулятор интерпретирует язык жестов

 Ученые робототехники думают о создания роботов против Эболы
Ученые робототехники думают о создания роботов против Эболы

 Ученые строят очень точную модель молекулярного строения воды используя машинное обучение
Ученые строят очень точную модель молекулярного строения воды используя машинное обучение

 Робот-певец и автор песен Shimon выпустит первый свой музыкальный альбом
Робот-певец и автор песен Shimon выпустит первый свой музыкальный альбом

 Робот Origibot2 telepresence готов к интерактивности
Робот Origibot2 telepresence готов к интерактивности
 Как помочь машинам ADEPT воспринимать некоторые законы физики
Как помочь машинам ADEPT воспринимать некоторые законы физики







