
Способный регулировать силу робот с новой системой захвата
Человеческие руки замечательно умеют манипулировать целым рядом предметов. Мы можем взять яйцо не разбивая его. Одной из характеристик, которая позволяет нам выполнять самые разные задачи

Человеческие руки замечательно умеют манипулировать целым рядом предметов. Мы можем взять яйцо не разбивая его. Одной из характеристик, которая позволяет нам выполнять самые разные задачи, является способность изменять силу нашей хватки, и инженеры Университета в Буффало разработали робота с двумя пальцами, который разделяет эту черту. Конструкция роботизированной руки позволяет устройству поглощать энергию от ударов во время столкновений. Это предотвращает поломку всего, что удерживает робот, а также повышает безопасность работы машины рядом с людьми.
Возможности применения робота
Такие захваты были бы ценным активом для партнерства между человеком и роботом на сборочных линиях в автомобильной, электронной упаковочной промышленности и других отраслях, говорит Эсан Исфахани, доктор философии, доцент кафедры механического и аэрокосмического машиностроения в Школе инженерии и прикладных наук UB. «Наш роботизированный захват имитирует способность человеческой руки регулировать силу захвата.
Эти захваты предназначены для совместных роботов, которые работают вместе с людьми», - говорит Исфахани. Новое исследование, опубликованное онлайн в IEEE Transactions по промышленной электронике , подчеркивает безопасную конструкцию устройства, в том числе посредством экспериментов, показывающих, как амортизирующие функции захвата удерживают палочку спагетти от поломки во время столкновения.
Особенности конструкции робота
Исфахани объясняет, что магниты являются секретом универсальности роботизированного захвата. Вместо того, чтобы два пальца были зафиксированы на месте, каждый из пальцев захвата имеет магнитное основание, которое находится между двумя неодимовыми магнитами, благодаря которым палец двигается. Воздушный зазор между магнитами действует как пружина, создавая небольшую отдачу, когда рука поднимает предмет или сталкивается с внешней силой.
Жесткость захвата также можно регулировать, увеличивая или уменьшая расстояние между магнитами. В новой статье Esfahani и Amirhossein Memar, бывший кандидат наук UB в области механического и аэрокосмического машиностроения, сообщают об этих функциях безопасности.
Проводимые тесты
В одном из тестов инженеры поместили короткую палочку спагетти вдоль пальцев робота. Когда захват врезается в неподвижный объект, устройство обнаруживало прилагаемое внешнее усилие, которое заставляло магниты регулировать свое положение, временно уменьшая жесткость захвата и позволяя захвату поглощать часть энергии от столкновения. Какой конечный результат? Палочка для спагетти осталась в целости и сохранности.
Исфахани отмечает, что захват, который разрабатывает его команда, может быть прикреплен к имеющимся в продаже роботизированным вооружениям, которые уже используются во многих учреждениях. Это может снизить стоимость адаптации технологии для компаний, заинтересованных в повышении безопасности и возможностей существующих машин. Исфахани запускает новую компанию для коммерциализации технологии лицензирования UB.
Его команда получила 55 000 долларов от Фонда Буффало: Ускоритель - финансируемый Инновационным Центром, который управляется UB и поддерживается Empire State Development - для дальнейшего развития роботизированной руки. В дополнение к уточнению текущей конструкции захвата, команда может также изучить достижения, такие как добавление третьего пальца.
Исследователи, которые участвовали в разработке и тестировании захвата, включают аспиранта Шри Садхана Джуджаварапу и Мемара, соавтора нового исследования, который получил докторскую степень в UB и в настоящее время является научным сотрудником лаборатории Facebook Reality Labs.
Автор статьи: Виктор Булавин
Похожие статьи:

 Лаборатория для изучения взаимодействия человека и робота
Лаборатория для изучения взаимодействия человека и робота

 Скрытые в музыке данные для отправки паролей Wi-Fi на телефон могут использовать ученые
Скрытые в музыке данные для отправки паролей Wi-Fi на телефон могут использовать ученые

 Роботизированная черепаха самостоятельно учится плыть по пустыне
Роботизированная черепаха самостоятельно учится плыть по пустыне

 Платформа MPA создает профессиональное аудио оборудование которое похоже на Lego
Платформа MPA создает профессиональное аудио оборудование которое похоже на Lego

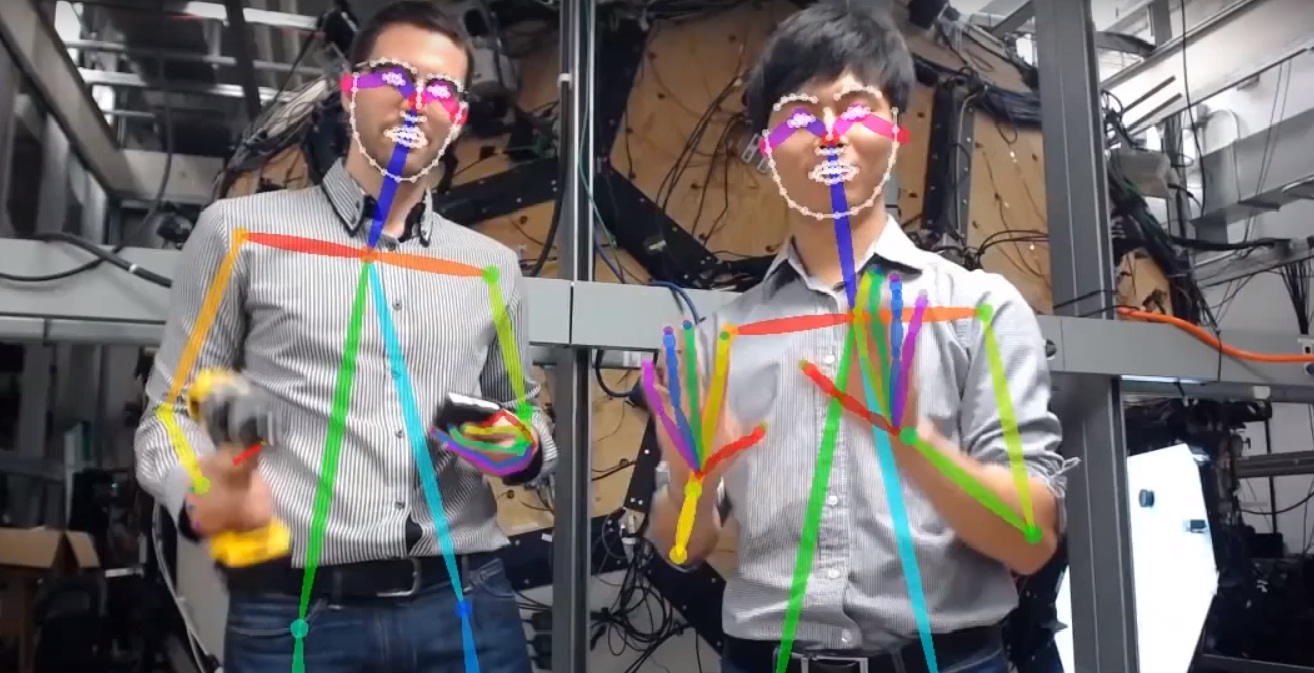 Роботы учатся говорить на языке тела
Роботы учатся говорить на языке тела
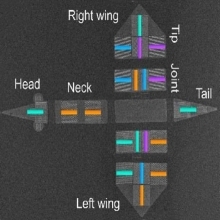
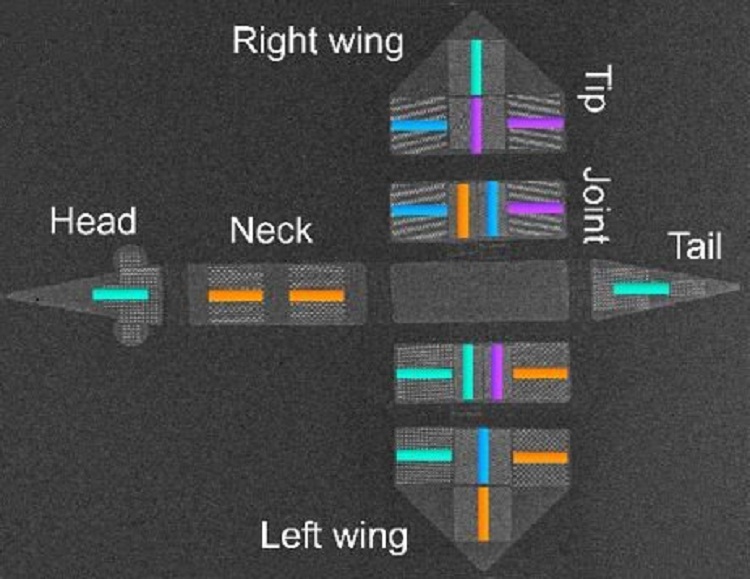 Эти микромашины летают на силе магнетизма
Эти микромашины летают на силе магнетизма







