
Cheetah 3 – робот который легко преодолевает препятствия
Робот MIT Cheetah 3 может подниматься по лестнице и преодолевать препятствия без помощи камер или визуальных датчиков
 Одно дело сделать робота, который может бегать, но как насчет того, который может сделать это вслепую? Новый робот Cheetah 3 от MIT отвечает на этот вопрос, буквально перепрыгивая неровности уверенными скачками, робот даже перемещается по лестнице - все без проблем. Вместо этого, 41-килограммовый робот размером с собаку передвигается с помощью внутренних датчиков и алгоритмов.
Одно дело сделать робота, который может бегать, но как насчет того, который может сделать это вслепую? Новый робот Cheetah 3 от MIT отвечает на этот вопрос, буквально перепрыгивая неровности уверенными скачками, робот даже перемещается по лестнице - все без проблем. Вместо этого, 41-килограммовый робот размером с собаку передвигается с помощью внутренних датчиков и алгоритмов.
Ходьба – это на самом деле сложней чем кажется
Как люди, мы часто имеем очень искаженное представление о том, что легко и что сложно. Мы считаем, что вычислять сложные математические уравления или играть в шахматы на уровне гроссмейстера действительно сложно, а ходить очень просто. Это одна из причин, по которой старые научно-фантастические рассказы наполнены роботами с интеллектом ZX-80, но вполне способны отправиться на прогулку.
Фактически, ходить очень сложно, и даже если у робота есть четыре ноги вместо двух. Нам это кажется простым и легким, потому что мы можем это сделать, не задумываясь. Одной из причин этого является то, что ходьба - это буквально то, что вы можете делать с закрытыми глазами. Хотя мы в значительной степени полагаемся на свои глаза и избегаем препятствий, а наше чувство осязания и памяти сочетается с ментальным образом нашого тела, где находятся наши конечности, сколько силы воздействует, какое усилие нужно приложить чтобы подняться на бугор.
Итак знакомьтесь - Cheetah 3
В рамках разработки новейшей серии роботов Cheetah команда MIT во главе с профессором машиностроения Sangbae Kim работает над улучшением роботизированного передвижения, полагаясь меньше на визуальные системы, которые часто являются неточными и медленными, вместо того тактильная информация из внутренних датчиков зарекомендовала себя рамного лучше. Cheetah 3 имеет расширенный диапазон движений, который позволяет ему растягиваться назад и вперед и крутиться из стороны в сторону, был запрограммирован двумя новыми алгоритмами, которые помогают ему ощущать окружающую среду и предсказывать движения.
Согласно MIT, алгоритм обнаружения контакта с поверхностью сообщает Cheetah 3 о состоянии от каждой конечности 20 раз в секунду с использованием гироскопов, акселерометров, чтобы определить, как лучше их перемещать. Он делает это, вычисляя шансы каждой ноги на контакт с землей, вероятность силы, возникающей, когда нога ударяет по земле. Таким образом, робот может решить, когда переключиться в нужный режим передвижения или чтобы завершить шаг.
Робот может рассчитать, как наклонять и как переставлять ноги, и когда нужно сжать их, чтобы поддерживать равновесие. Когда команда запустила его на беговой дорожке в лаборатории, робот свободно поднялся по лестнице - с препятствиями в виде деревянных блоков и рулоны бумаги.
Второй алгоритм позволяет Cheetah улучшить свою ходьбу, предсказывая, сколько силы ему нужно приложить на каждую ногу, прежде чем сделать шаг. Алгоритм управления модели работает по принципу вычисления вариантов передвижения для ног и тела в с задатком в будущее на пол секунды. Это не только удерживает робота в целом стабильно на тверди, но также помогает помочь, если кто-то решит причинить роботу вред.
Робот хорошо держится на плаву не боясь трудностей
«По сути, если вы попытаетесь ударить робота ногой, он тот час же среагирует, и удержится в стоячем положении», - говорит Ким.
Чтобы доказать это, команда провела испытания, когда робот бежал по беговой дорожке, они поочередно били ногами и толкали его и даже дергали, когда робот поднималась по лестнице. В каждом случае алгоритм позволял ему проявлять противодействующие силы и компенсировать сохранение баланса.
Хотя Cheetah 3 в настоящее время слеп, команда таки использовала камеры на роботе, чтобы помочь ему увидеть мир. Причина, по которой визуальные первоначально были отключены, состоит в том, чтобы научить Гепарда 3 сосредоточиться на слепом восприятии. Как только это будет совершено, камеры будут подключены к общей сети робота. В конце концов, надежда состоит в том, чтобы создать робота, который может попасть в опасные и недоступные места вместо людей.
«Cheetah 3 предназначен для выполнения универсальных задач, таких как например осмотр вышедших из строя электростанций, в которых человеку находится попросту опаско для жизни», - говорит Ким. «Опасную, грязную и трудную работу можно сделать гораздо безопаснее с помощью роботов с дистанционным управлением».
Исследование будет представлено на Международной конференции по интеллектуальным роботам в Мадриде в октябре этого года.
Видео, представленное ниже, показывает работу Cheetah 3.
Автор статьи: Виктор Булавин
Похожие статьи:
 Новые изменяющие форму роботы изменят наше окружение
Новые изменяющие форму роботы изменят наше окружение

 Автономные блочные роботы M-Blocks от MIT прыгают катаются и собираются в конструкции
Автономные блочные роботы M-Blocks от MIT прыгают катаются и собираются в конструкции
 Подводные роботы Nereid Under Ice
Подводные роботы Nereid Under Ice

 Smartipresence Миниатюрный робот которым можно управлять при помощи видеосвязи
Smartipresence Миниатюрный робот которым можно управлять при помощи видеосвязи
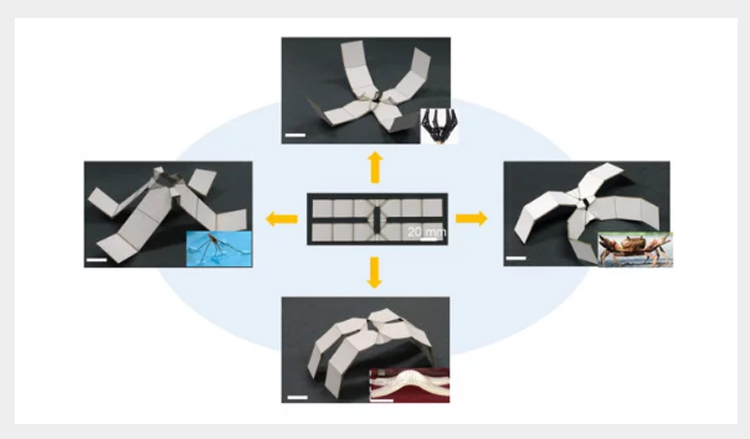
 Bспользует всего пять частей для сборки сложных роботов Lego-подобная сборочная система
Bспользует всего пять частей для сборки сложных роботов Lego-подобная сборочная система

 Провал фильма Близнецы и проблемы высокоскоростного кинематографа
Провал фильма Близнецы и проблемы высокоскоростного кинематографа







