
Для улучшения балансировки роботов ученые создали роботизированный хвост Arque
Вдохновленный структурой изогнутого конца морского конька, хвост состоит из подпружиненных суставов, которые образуют соединенные позвонки с искусственными мышцами, которые позволяют ему двигаться

Роботизированные хвосты используются у многих представителей царства животных, чтобы помочь с поддержанием баланса или захватом предметов. У людей такого приспособления нет, поэтому ученые из Высшей школы медиа-дизайна при Университете Кейо создали его, чтобы повысить маневренность и функциональность пользователей.
Конечно, хвосты для людей производятся, и используются в основном для косплея, но хвост Arque, разработанный Junichi Nabeshima, MHD Yamen Saraiji и Kouta Minamizawa, предназначен для более серьезных целей.
Об изобретении Arque
Вдохновленный структурой изогнутого конца морского конька, протезный хвост состоит из подпружиненных суставов, которые образуют соединенные позвонки с пневматическими искусственными мышцами, которые позволяют ему двигаться.
Прототип имеет длину 71 см (28 дюймов), ширину 11,5 см (4,5 дюйма) и вес в 1,6 кг (3,5 фунта), но конструкция позволяет создавать более длинные или более короткие хвосты. Воздушный компрессор используется для приведения в действие мышц, что позволяет ему двигаться в восьми разных направлениях. Это означает, что это еще не автономное устройство, но оно может быть улучшено до этого этапа в будущем по мере совершенствования технологии.
Принцип работы
С Arque центр тяжести владельца может быть изменен путем поворота хвоста, почти так же, как у обезьяны, перепрыгивающей с одной ветви на другую, используя свой хвост для регулировки положения в полете.
Трекер тела, надетый на верхнюю часть пользователя оценивает положение тела, и хвост располагается соответственно полученным данным. Это изобретение, как считают ученые, поможет людям стать более мобильными. Команда говорит, что хвост может также обеспечить более реалистичную тактильную обратную связь для людей в среде виртуальной реальности, меняя баланс, чтобы лучше соответствовать тому, что происходит в виртуальном мире, например, при ходьбе против сильного ветра.
Проект был недавно представлен на SIGGRAPH 2019, и документ с прототипом доступен для просмотра онлайн. В видео ниже вы можете получить больше информации.
Автор статьи: Виктор Булавин
Похожие статьи:

 Nissan демонстрирует робота который рисует футбольные поля
Nissan демонстрирует робота который рисует футбольные поля

 Новая школа UW – Madison делает упор компьютерные технологии
Новая школа UW – Madison делает упор компьютерные технологии

 Миниатюрныйо магнитный насос 3D-печать
Миниатюрныйо магнитный насос 3D-печать
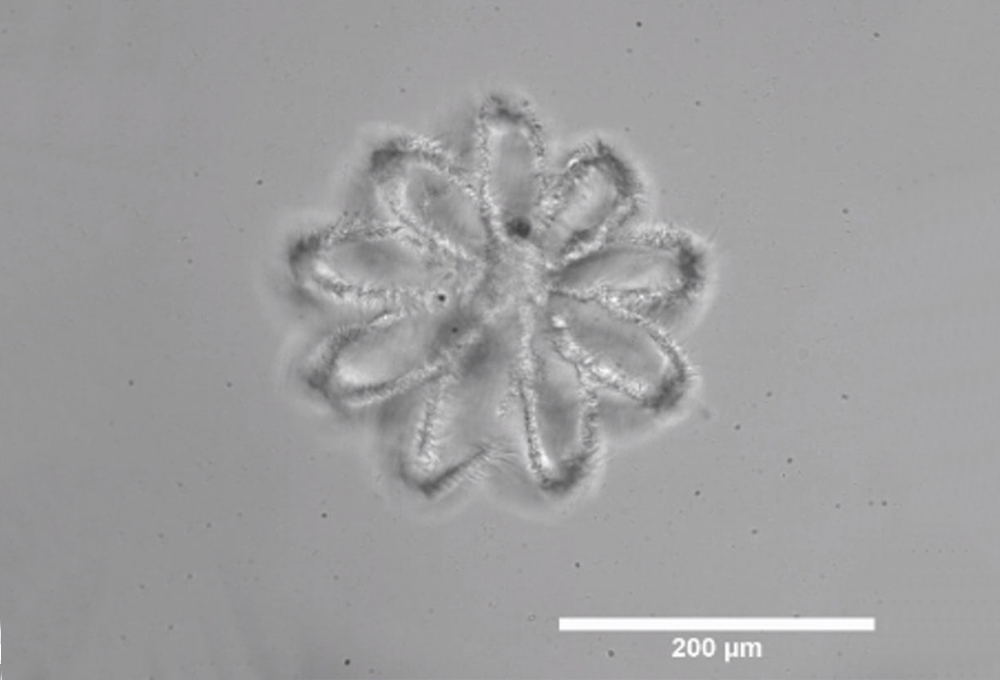 Новая 3D-технология печатает ткани человека с капиллярами
Новая 3D-технология печатает ткани человека с капиллярами

 Побил рекорды по плотности и емкости данных новый прототип магнитной ленты
Побил рекорды по плотности и емкости данных новый прототип магнитной ленты

 Новые роботы на Ceatec 2016
Новые роботы на Ceatec 2016







