
- Главная
- >
- Роботы
- >
- Промышленные роботы
- >
- Команда ROS-Industrial разрабатывает роботизированное устройство для улучшения машинного зрения
Команда ROS-Industrial разрабатывает роботизированное устройство для улучшения машинного зрения
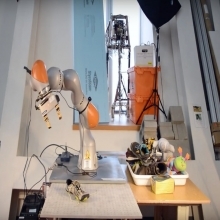
Юго-западный научно-исследовательский институт и ROS-Industrial разработали устройство, позволяющее промышленным роботам сканировать и манипулировать металлическими объектами

Юго-западный научно-исследовательский институт и ROS-Industrial разработали устройство, позволяющее промышленным роботам сканировать и манипулировать металлическими объектами, которые ранее были слишком «блестящими» для машинного зрения.
Основные изменения
В проекте реализована интеллектуальная реконструкция деталей с использованием платформы Robos Operating System (ROS2) второго поколения для улучшения восприятия трехмерного изображения, когда роботы автономно шлифуют и обрабатывают детали.
Посмотрите демонстрацию на стенде SwRI № 8214 в Automate в Чикаго 8-11 апреля. «Это отличный пример использования и решения проблем интеграции ROS2 в промышленную робототехнику», - сказал Мэтт Робинсон, менеджер SwRI, который поддерживает ROS-Industrial.
«Это также показывает, как усовершенствованные алгоритмы восприятия могут обеспечить более быстрое и надежное сканирование металлических объектов». ROS-Industrial используют ROS для создания ROS-I, промышленной формы программного обеспечения с открытым исходным кодом, используемого крупными производителями по всему миру.
ROS-I
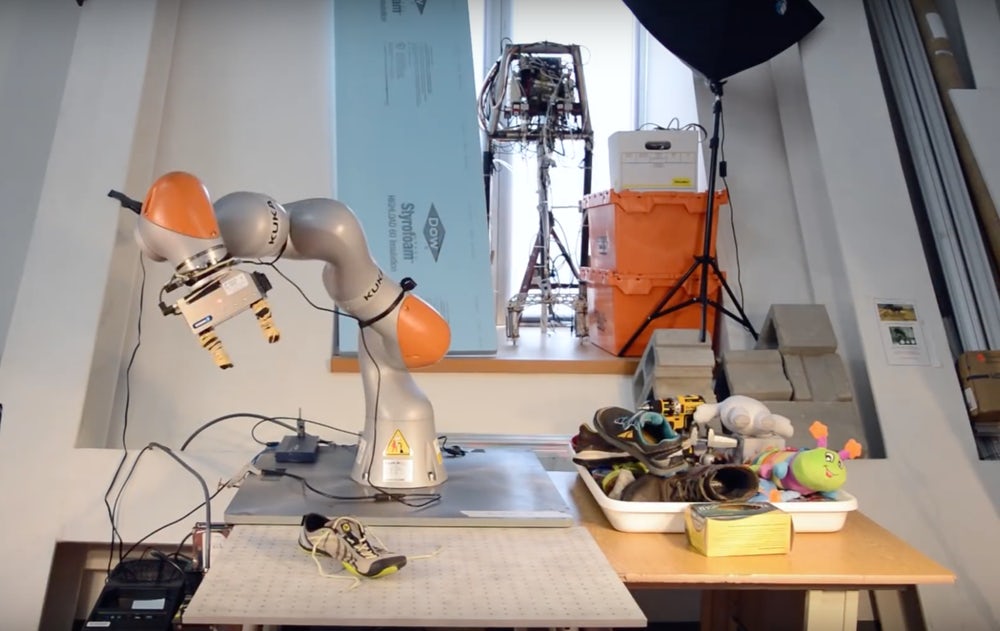
Новейшее решение ROS-I использует ROS2 для интеграции камер, прикрепленных к манипулятору, собирая данные облака точек с высокой частотой кадров для создания трехмерной выходной сетки, которая оптимизирует планирование пути. Камеры и алгоритмы машинного зрения исторически изо всех сил пытались воспроизвести точные трехмерные изображения металлических объектов из-за «визуального шума», который рассеивает высоко отражающие поверхности.
Эта значительная задача ограничивает автоматизацию процессов сварки и обработки поверхности в аэрокосмической и автомобильной промышленности. Sw RI в сотрудничестве с ROS-Industrial преодолевает эту проблему, интегрируя алгоритмы поля усеченных расстояний между знаками, которые с большей скоростью объединяют несколько изображений или точек.
В устройстве используется Traj Opt или оптимизация траектории для планирования движения в рамках ROS-Industrial Scan-N-Plan для обеспечения планирования траектории в реальном времени из данных трехмерного сканирования.
Робинсон сказал, что проект также подчеркивает преимущества подхода на основе ROS, поскольку это решение не зависит от аппаратного обеспечения. Датчики и робот могут быть заменены с относительно небольшими усилиями. ROS-Industrial, известная своей совместимостью с открытым исходным кодом, предоставляет производителям стандартные программные драйверы для конечных эффекторов и аппаратное обеспечение плавного перемещения, которые обычно используют более раннее программное обеспечение ROS.
«Этот проект в конечном итоге стал успешным мостом от ROS к ROS2», - сказал Робинсон. «Но мы знаем, что переход к ROS2 будет большой задачей, так как столько зависимых пакетов и возможностей все еще находятся в ROS». Sw RI инициировала разработку ROS-Industrial в 2012 году с помощью внутренней исследовательской программы Sw RI, проводимой с коллабораторами.
Sw RI поддерживает хранилище программного обеспечения ROS-Industrial и управляет консорциумом ROS-Industrial. Консорциумы ROS-Industrial - с филиалами в Северной и Южной Америке, Европе, а теперь и в Азии - обеспечивают совместные прикладные исследования и разработки для передовых средств автоматизации производства. Члены консорциума внедряют новые возможности в ROS-I, отстаивая сфокусированные технические проекты, основанные на их ближайших требованиях автоматизации.
Автор статьи: Виктор Булавин
Похожие статьи:
 Могут ли роботы с двумя руками ускорить сортировку пакетов?
Могут ли роботы с двумя руками ускорить сортировку пакетов?

 Робот для сбора огурцов
Робот для сбора огурцов

 Новый робот MCD поддается обучению прямо во время работы
Новый робот MCD поддается обучению прямо во время работы

 Сборочный робот
Сборочный робот
 DON робот - мастер ловкости
DON робот - мастер ловкости
 Микро-робот HAMR
Микро-робот HAMR







