
- Главная
- >
- Роботы
- >
- Промышленные роботы
- >
- Робот для работы с ядерными реакторами
Робот для работы с ядерными реакторами
Никто не хочет приближаться к ядерным отходам, поэтому команда инженеров Ланкастерского университета разрабатывает новую полуавтономную роботизированную систему, которая поможет демонтировать реакторы

Никто не хочет приближаться к ядерным отходам, поэтому команда инженеров Ланкастерского университета разрабатывает новую полуавтономную роботизированную систему, которая поможет демонтировать снятые с эксплуатации реакторы.
Используя новое программное обеспечение для обработки изображений и камеру Microsoft Kinect, мобильный робот с двумя руками может распознавать, захватывать и резать объекты, например, трубы, и оператор не должен контролировать каждое движение.
Цели робота
Вывод из эксплуатации ядерного реактора - это долгая и дорогостоящая работа, требующая очень высокой квалификации. К сожалению, это также работа, которую необходимо выполнять в высокорадиоактивной среде, загрязненной всеми уровнями ядерных отходов. Это ставит рабочих в незавидное положение, когда им нужно быть на месте, пока их задача не будет выполнена полностью.
«Стандарт в области снятия с эксплуатации ядерных систем относится к дистанционному управлению роботами, управляемым человеком, что крайне сложно для операторов, особенно учитывая сложность задач по снятию с эксплуатации реакторов», - говорит Джеймс Тейлор, профессор инженерного управления в инженерном факультете Университета Ланкастера. «Полностью автономные решения вряд ли будут считаться безопасными в ближайшем будущем, и поэтому мы исследовали создание полуавтономного решения, которое находится между ними».
Особенности робота
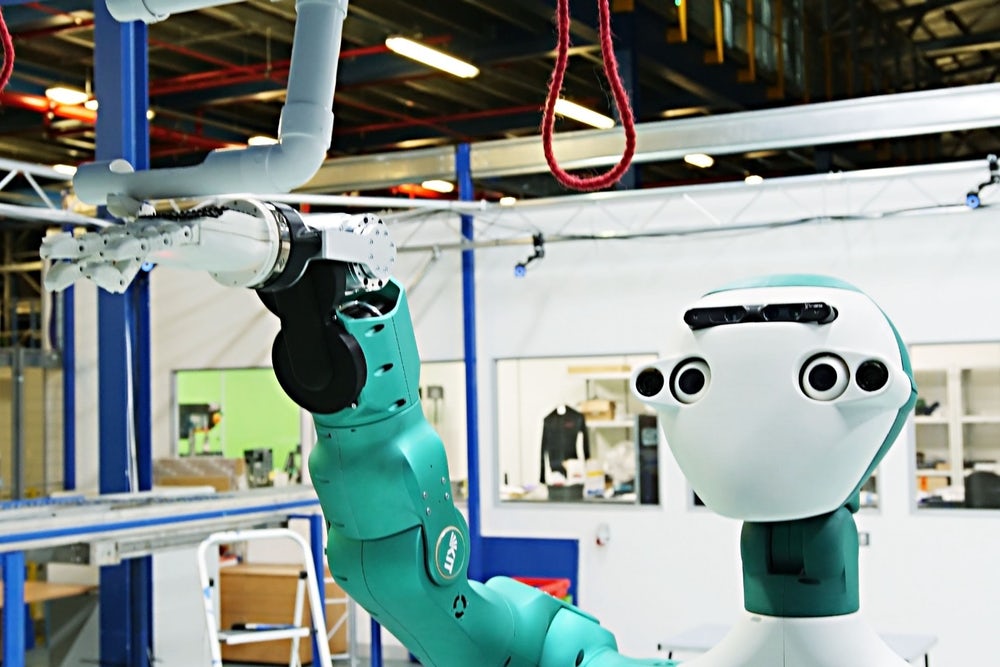
Робот-прототип оснащен гидравлическим оружием и манипуляторами с камерой, обеспечивающей визуальную информацию. Тем не менее, камера - это не просто устройство с замкнутым контуром. Вместо этого компьютер анализирует изображения, позволяя промышленному роботу идентифицировать объекты и определять, как их захватывать, манипулировать и вырезать. Вместо обычного джойстика оператор указывает на нужный объект на экране, а робот обрабатывает все остальное.
«Используя единственную камеру, установленную на роботе, наша система фокусируется на общей задаче в этих суровых условиях - выборе и резке труб», - говорит Тейлор. «Наша система позволяет оператору инструктировать робота-манипулятора выполнять захват и резку труб всего лишь четырьмя щелчками мыши. Тесты показывают, что операторы, использующие эту систему, успешно превосходят операторов, используя текущий стандарт робота, основанный на джойстике.
Это позволяет пользователю контролировать робота в целом, но значительно снижает нагрузку и время работы. " Поскольку система предназначена для использования операторами без необходимости интенсивного обучения, проект также работает над тем, как оснастить робота несколькими датчиками для таких вещей, как звук и температура, чтобы предоставить пользователю лучшее представление об окружении.
Это включает в себя разработку графического интерфейса пользователя, который превращает поток необработанных данных в значимые показания, которые можно быстро интерпретировать и понять. Это немного похоже на указатель уровня топлива в автомобиле, который не дает точного числового значения того, сколько галлонов осталось в баке, а вместо этого превращает данные в простой циферблат с иглой, перемещающейся между E и F.
Команда говорит, что робот был протестирован в лаборатории с небольшим количеством операторов, выполняющих такие задачи, как резка пластиковых труб. Чтобы робот был более практичным, необходимо выполнить больше работы, включая защиту машины от радиационных повреждений.
Автор статьи: Виктор Булавин
Похожие статьи:

 Онлайн супермаркет представляет первый прототип ARMAR-6 помощника по обслуживанию роботов
Онлайн супермаркет представляет первый прототип ARMAR-6 помощника по обслуживанию роботов
 Цилиндрический тип робота
Цилиндрический тип робота

 Робот Cogiro контролирует здания, когда он их печатает
Робот Cogiro контролирует здания, когда он их печатает

 Используется в японских магазинах Робот-штабелер Model-T с VR-управлением
Используется в японских магазинах Робот-штабелер Model-T с VR-управлением

 Команда ROS-Industrial разрабатывает роботизированное устройство для улучшения машинного зрения
Команда ROS-Industrial разрабатывает роботизированное устройство для улучшения машинного зрения

 Сборочный робот
Сборочный робот







