
- Главная
- >
- Дроны и беспилотные летательные аппараты
- >
- Новая камера помогает дронам уклоняться от брошенных предметов
Новая камера помогает дронам уклоняться от брошенных предметов
Этот дрон использует специализированную камеру событий, которая реагирует на изменения в окружении на основе пикселей в микросекундах, чтобы ловко избегать препятствий

Этот дрон использует камеру событий, которая реагирует на изменения в окружении на основе пикселей в микросекундах, чтобы ловко избегать препятствий.
Новые камеры для дронов
Группа по робототехнике и восприятию Davide Scaramuzza в Цюрихском университете впервые использовала камеры событий на беспилотных летательных аппаратах. Мы впервые написали о подобных камерах еще в 2014 году: это датчики, которые не очень хорошо интерпретируют сцену визуально, как обычная камера, но они чрезвычайно чувствительны к движению, реагируя на изменения в сцене на основе пикселей в микросекундах.
Обычная камера, которая обнаруживает движение, сравнивая один кадр с другим, тратит миллисекунды на то же самое, что может показаться не таким уж большим, но для быстроходного беспилотника это может быть разницей между врезанием во что-то и его успешным избеганием.
Первые тесты
В документе, недавно принятом в IEEE Robotics and Automation Letters, Давиде Фаланга и Сусонг Ким из группы Скарамузза рассказывают, насколько сильно может отличаться использование камеры событий на беспилотных летательных аппаратах, движущихся на высоких скоростях.
И чтобы подтвердить свои исследования, они бросают футбольные мячи в беспилотник так сильно, как только могут, и смотрят, сможет ли он их избежать.
Впечатляет, правда? Что касается беспилотника, то это умный способ имитировать препятствия, встречающиеся в высокоскоростном полете, поскольку важна относительная скорость. Кроме того, исследователи говорят, что в каждом случае данные захвата движения подтверждают, что «мяч попал бы в транспортное средство, если бы маневр уклонения не был выполнен». Время, необходимое роботу (любого типа), чтобы избежать препятствия, ограничено, прежде всего, задержкой восприятия, которая включает в себя восприятие среды, обработку этих данных и затем генерацию команд управления.
В зависимости от того, какой датчик вы используете, какой алгоритм вы используете и какой компьютер используете, типичная задержка восприятия составляет от десятков миллисекунд до сотен миллисекунд. Сам датчик обычно вносит основной вклад в эту задержку, что делает камеры событий настолько привлекательными - они могут обрабатывать данные с теоретической задержкой, измеряемой в наносекундах.
Вопрос, на который хотят ответить исследователи Цюрихского университета, заключается в том, насколько задержка восприятия фактически влияет на максимальную скорость, с которой беспилотник может двигаться, в то же время будучи в состоянии успешно уклоняться от препятствий. Сравнивая тип традиционных датчиков зрения, которые вы найдете на квадрокоптере исследовательского уровня, и на камере для событий, оказывается, что разница на самом деле не так уж и значительна, если вы имеете дело с квадрокоптером, который движется не слишком быстро.
Однако по мере увеличения скорости дрона камеры событий могут начать что-то менять - например, квадрокоптер с отношением тяги к весу 20 может достичь максимальной скорости безопасного избежания препятствий, которая примерно на 12 процентов выше, чем если бы она была использована обычная камера. Настолько мощных устройств не существует, но мы скоро доберемся до цели.
Возможно, немного удивительно, что камеры событий не дают более существенного преимущества квадрокоптерам с латентностью при более низких скоростях, но важно помнить, что камеры событий также хороши и по другим причинам: они не страдают от размытия движения, и они намного более устойчивы к неблагоприятным погодным условиям, способны отлично работать как в темноте, так и в условиях большого динамического диапазона, например, при взгляде на солнце.
По мере того, как скорость и маневренность дронов возрастают, и особенно если мы хотим начать использовать их в неструктурированных средах для практических целей, кажется, что камеры событий будут подходящим вариантом.
Автор статьи: Виктор Булавин
Похожие статьи:

 Parrot и их новый 4K Anafi FPV Drone
Parrot и их новый 4K Anafi FPV Drone

 Беспилотник-дрон Skydio 2 - это прекрасное самообучающееся творение
Беспилотник-дрон Skydio 2 - это прекрасное самообучающееся творение

 Для мониторинга количества складских запасов Ware tech использует квадрокоптеры
Для мониторинга количества складских запасов Ware tech использует квадрокоптеры

 Автономные беспилотники для защиты самолетов от вредных птиц
Автономные беспилотники для защиты самолетов от вредных птиц

 Способен летать на протяжении часа или перевозить грузы общим весом в 44 фунта новый гексакоптер Noa
Способен летать на протяжении часа или перевозить грузы общим весом в 44 фунта новый гексакоптер Noa
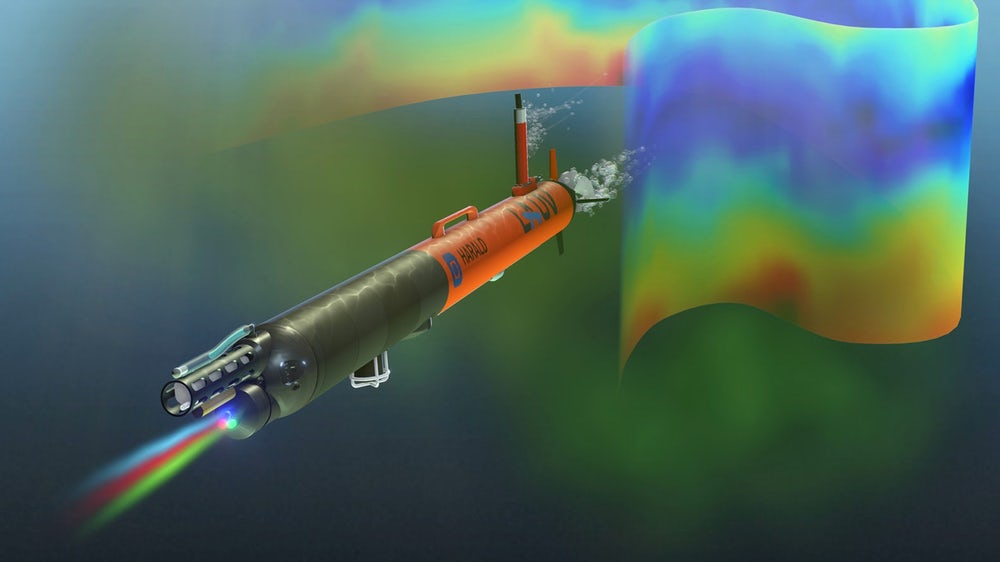 Автономный робот AUV ищет планктонные пятна чтобы спасти птиц
Автономный робот AUV ищет планктонные пятна чтобы спасти птиц







