
- Главная
- >
- Новости
- >
- Новая мульти-материальная 3D-печать может помочь создать лучшие роботизированные системы
Новая мульти-материальная 3D-печать может помочь создать лучшие роботизированные системы
Китайские и сингапурские исследователи предложили новый подход к созданию более качественных мягких роботов. Их концепция объединила 3D-печать и несколько активируемых теплом материалов

Китайские и сингапурские исследователи предложили новый подход к созданию более качественных мягких роботов. Их концепция объединила 3D-печать и несколько активируемых теплом материалов для создания роботизированных приводов, которые могли бы преодолеть проблемы мягких материалов.
Большинство роботов имеют жесткие части, которые могут нанести серьезные травмы любому находящемуся поблизости человеку, который получил удар от быстро движущейся механической конечности.
Эта физическая опасность была значительно уменьшена благодаря внедрению мягких роботов - машин с внешними оболочками и механическими приводами из силиконовых каучуков и других мягких материалов. Самой важной особенностью мягких роботов оказалась и их самая большая слабость.
Их низкий уровень жесткости сделал их слабыми в отличии от более жестких роботов, которые должны выдерживать большие нагрузки в течение любого периода времени. Чтобы решить эту проблему, исследователи работали над материалами, которые могут увеличивать и уменьшать жесткость. Мягкий робот, изготовленный из этих перестраиваемых по жесткости материалов, может иметь лучшую грузоподъемность, сохраняя при этом свою безопасность для людей и их рабочей среды
Разработка термически активируемого полимера для использования в мягкой робототехнике
Полимеры с памятью формы (SMP) являются очень многообещающим типом перестраиваемого материала. Они могут значительно изменить свою жесткость при нагревании и восстановят свою первоначальную жесткость после охлаждения. Кроме того, эти материалы пригодны для использования в системах производства добавок, которые также используют тепло для их смягчения. Однако полимеры страдали от собственных проблем.
Мягкие приводы из SMP реагировали медленнее, чем ожидалось, и показали лишь незначительную деформацию. Они также не подходили для автоматизированных методов производства. Исследовательская группа из Сингапурского университета технологий и дизайна (SUTD) и Шанхайского университета Цзяо Тонг (SJTU) предложила использовать моделирование методом конечных элементов для создания гибридного мульти материала, который можно было бы использовать в 3D-печати.
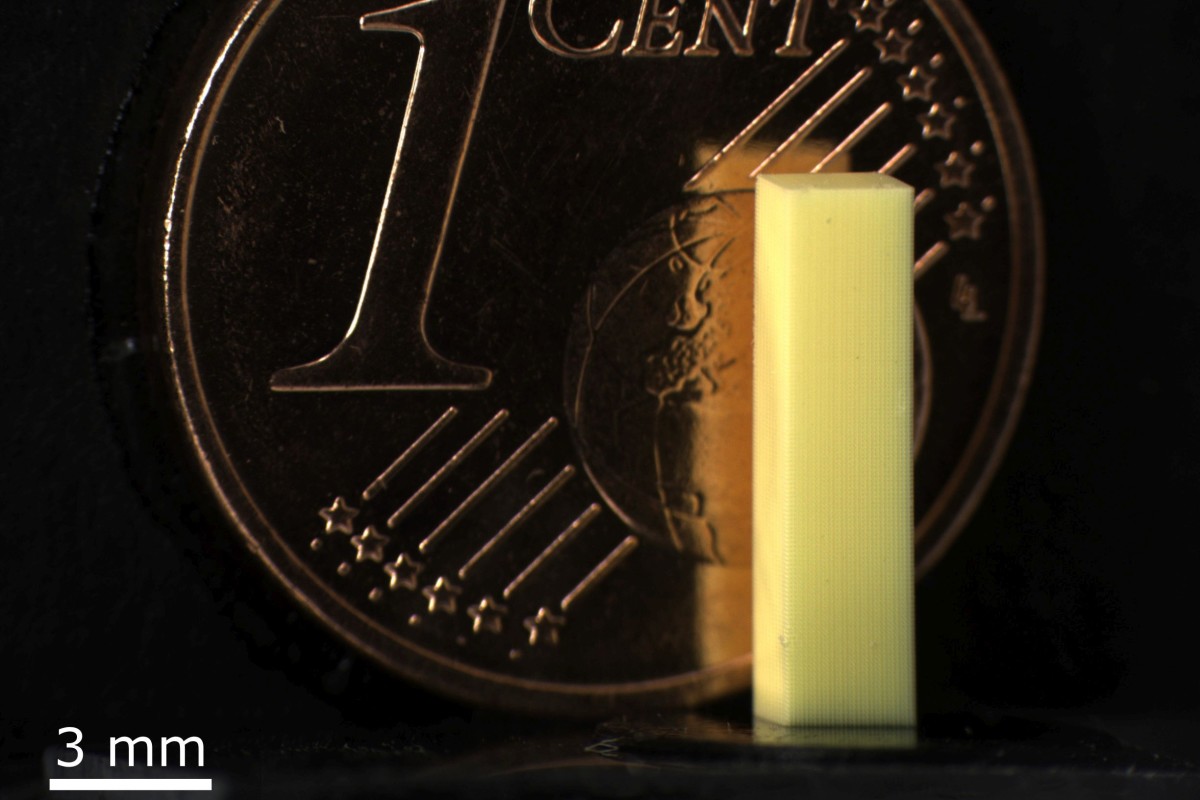
Они полагают, что этот новый подход может привести к созданию быстродействующих мягких приводов с регулируемой жесткостью (FRST), которые могут перейти от мягкого к жесткому и вернуться назад всего за 32 секунды.
«Мы сочетаем коммерческую технологию струйной многослойной 3D-печати с подходом прямой чернильной печати для изготовления нашего полностью напечатанного привода FRST», - отметил доцент SUTD Ци (Кевин) Ге. «Регулируемость жесткости обеспечивается встроенным слоем SMP, а быстрый отклик обеспечивается встроенными нагревательными и охлаждающими элементами».
Мягкий привод, который может перейти от мягкого к твердому и обратно за полминуты
В опубликованной статье Ге описал, как добавление слоя SMP к механическому приводу повысило жесткость на 12 000 процентов. В то же время привод FRST сохранит свою гибкость и универсальность.
Проводящий контур 3D напечатан на полимерном слое. Сделанный из нано частиц серебра, контур использовал нагрев, чтобы активировать способность полимера изменять жесткость. Активированная SMP использовала сжатый воздух для изменения формы привода. После этого охлаждающую жидкость пропускали через жидкостный канал в слое. Как только полимер остыл, он также застыл, зафиксировав привод на месте.
«Деформированный привод в своем жестком состоянии может выполнять задачи, связанные с нагрузкой, даже после выпуска сжатого воздуха», - сказал Ге. «Что еще более важно, цикл нагрева-охлаждения может быть завершен примерно за полминуты, что, по нашим сведениям, является самым быстрым показателем». Кроме того, исследователи проверили поведение своего привода FRST с помощью компьютерного моделирования еще до того, как распечатали его детали и собрали устройство.
Модели помогли усовершенствовать устройство и показали, как можно увеличить нагрузочную способность. Таким образом, экспериментальный роботизированный захват с тремя такими приводами может захватывать и удерживать различные предметы весом до 3,3 фунтов.
Автор статьи: Виктор Булавин
Похожие статьи:

 Материал дихроичной 3D-печати меняет цвет в зависимости от ракурса
Материал дихроичной 3D-печати меняет цвет в зависимости от ракурса

 Персональный робот Jibo поднимает $ 13 млн
Персональный робот Jibo поднимает $ 13 млн

 Для запуска игровой потоковой платформы Stadia Google уточняет цену название и дату
Для запуска игровой потоковой платформы Stadia Google уточняет цену название и дату
 Учится двигаться и прилипать жидкокристаллический полимер
Учится двигаться и прилипать жидкокристаллический полимер

 Cвою новую передвижную систему выработки электроэнергии протестировали Toyota и Honda
Cвою новую передвижную систему выработки электроэнергии протестировали Toyota и Honda
 Способна печатать даже самые сложные элементы эта система 3D-печати
Способна печатать даже самые сложные элементы эта система 3D-печати







