
Представлен подобный растению захват способный обвиваться вокруг предметов
Любой, кто выращивает вьющиеся растения, знает, что они отлично держатся за тонкие предметы, вроде веревок или бамбуковых шестов. Новый роботизированный захват, созданный на основе таких растений

Любой, кто выращивает вьющиеся растения, знает, что они отлично держатся за тонкие предметы, вроде веревок или бамбуковых шестов. Новый роботизированный захват, созданный на основе таких растений, может найти применение при работе с небольшими хрупкими предметами. yприкосновению усики, которые обвиваются вокруг всего, что они встречают. Новый захват, разработанный командой из Университета Джорджии, nt[
Как создавался новый захват
«Мы пробовали разные варианты дизайна, но результаты нас не удовлетворили. Затем я вспомнил о бобах, которые выращивал в нашем саду несколько лет назад», - говорит ведущий ученый, Мейбл Фок. «Это растение способно очень крепко держатся за близлежащие растения и предметы. Итак, я провел небольшое исследование вьющихся растений и подумал, что этот дизайн идеально подошел бы для нашего нового устройства».
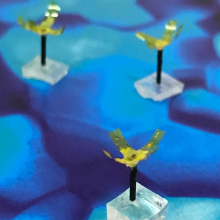
Получившийся прототип устройства, напечатанный на 3D-принтере, имеет цилиндрический эластичный корпус, похожий на усики растения, сделанный из силиконовой резины, с эластичным стержнем (по сути, резиновой трубкой), проходящим в продольном направлении внутри него. Этот стержень, в свою очередь, имеет в своей основе волоконно-оптический датчик и окружен заполненным воздухом пневматическим каналом, проходящим по всей его длине. Канал вьется вокруг стержня так же, как усик вьющегося растения наматывается на веревку.
Принцип работы захвата
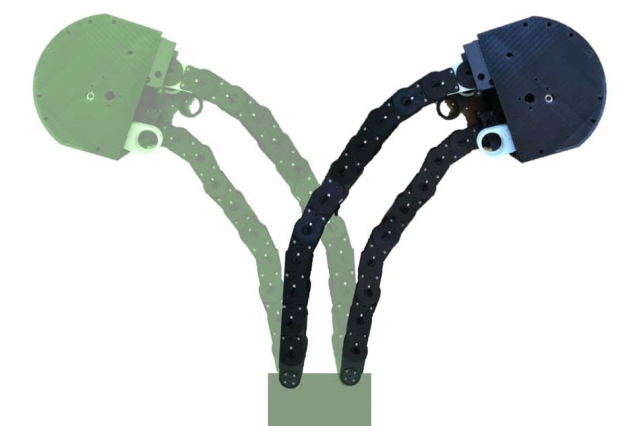
Когда оптоволоконный датчик обнаруживает, что захват контактирует с объектом, он посылает сигнал на подключенный миниатюрный компрессор, который должен закачать воздух в канал, окружающий стержень. Это приводит к тому, что захват закручивается, как штопор, при этом наматываясь на объект. Важно отметить, что датчик также может определять диаметр объекта и угол закручивания.
Он соответствующим образом регулирует количество воздуха, поступающего в пневматический канал, определяя, насколько плотно захват наматывается вокруг объекта - чем выше давление воздуха, тем круче угол поворота. Как только задача захвата будет завершена, снижение давления заставит захват снова выпрямиться и освободить предмет.
«Для функционирования нашего робота требуется только один пневматический элемент управления, что значительно упрощает его работу, устраняя необходимость сложной координации между несколькими пневматическими элементами управления», - говорит Фок. «Поскольку мы используем уникальное вращательное движение, мягкий роботизированный захват хорошо работает в ограниченном пространстве, не требуя много места».
Устройство уже использовалось для удержания карандашей, кистей и даже выпрямленной канцелярской скрепки. Есть надежда, что эта технология в конечном итоге будет использоваться для работы с хрупкими предметами, захвата образцов в стеклянных пробирках и выполнения других операций.
Автор статьи: Виктор Булавин
Похожие статьи:
 Новое партнерство организованное для ускорения поиска новых устойчивых источников энергии и материалов для различных приложений
Новое партнерство организованное для ускорения поиска новых устойчивых источников энергии и материалов для различных приложений

 В AMAZON представили нового робота Scout для доставки
В AMAZON представили нового робота Scout для доставки
 Ученые замедляют и направляют свет с помощью резонансных наноантенн
Ученые замедляют и направляют свет с помощью резонансных наноантенн
 Функционирует при помощи магнитов и света новый и впечатляющий робот вдохновленный кораллами
Функционирует при помощи магнитов и света новый и впечатляющий робот вдохновленный кораллами
 Гибкий но крепкий робот MIT который способен расти как растение
Гибкий но крепкий робот MIT который способен расти как растение

 Новый исследовательский робот – Movo
Новый исследовательский робот – Movo







