
- Главная
- >
- Роботы
- >
- Промышленные роботы
- >
- Робот MIT
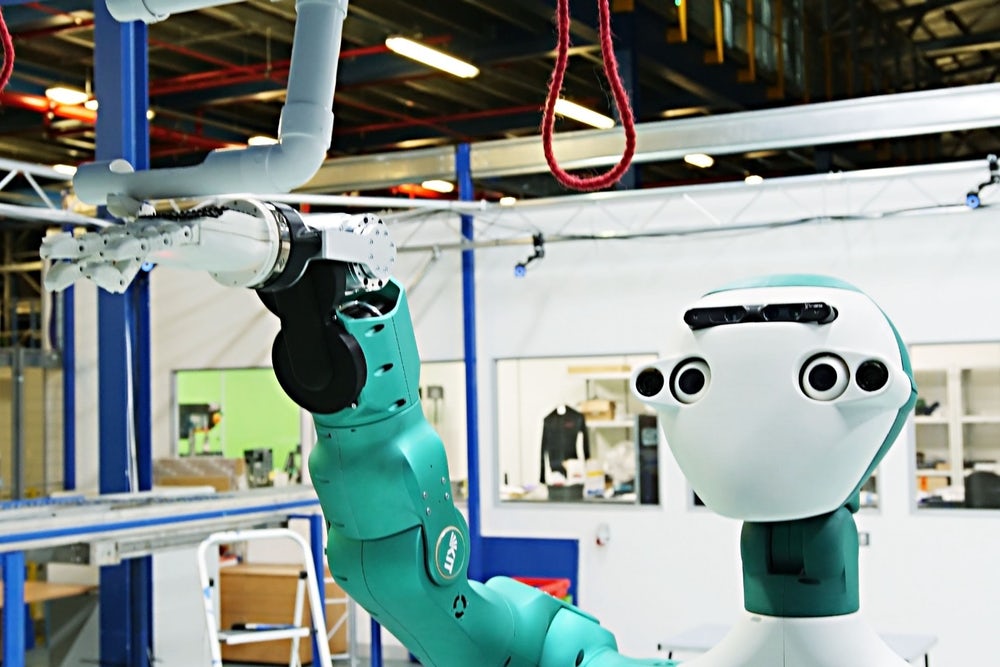
Робот MIT
Инженеры MIT разработали манипулятор, который может толкать и подталкивать лучших из них, полагаясь на визуальные данные, алгоритмы машинного обучения и быстро развивающуюся отрасль робототехники

Любой, кто играл в игру «Дженга», знает насколько точное прикосновение необходимо для предотвращения разрушения башни из деревянных блоков, и это не изящество, которое присуще типичному роботу. Инженеры MIT разработали манипулятор, который может толкать и подталкивать лучших из них, полагаясь на визуальные данные, алгоритмы машинного обучения и быстро развивающуюся отрасль робототехники, включающую тактильную обратную связь.
Новые возможности современных роботов
Роботы , обладающие чувством «прикосновения» в дополнение к более распространенным чертам, таким как способность видеть и захватывать вещи, становятся все более распространенными и несут с собой все виды новых возможностей.
Например, в прошлом месяце британская армия доставила роботов для обезвреживания бомб, оснащенных манипулятором, который передает физическую обратную связь удаленному пользователю, по-видимому, предлагая им ловкость, подобную человеку, при обезвреживании взрывчатых веществ на расстоянии.
Мы также видим, что такого рода машины используются для исследования глубин океана для поиска сокровищ, позволяют телеботничным рукопожатиям между Землей и космосом и дают пользователям протезов ощущение осязания.
Уникальность этих моделей
Хотя машины способны играть в игры, основанные на мышлении на уровне человека, такие как Го или шахматы, игра в такие игры, как Дженга, нуждающаяся в деликатном прикосновении, - это совсем другая история. «Игра в игру Дженгатакже требует овладения физическими навыками, такими как зондирование, толкание, вытягивание, размещение и выравнивание фигур», - говорит Альберто Родригес, доцент кафедры машиностроения в MIT.
«Это требует интерактивного восприятия и манипулирования, когда вам нужно идти и касаться башни, чтобы узнать, как и когда перемещать блоки. Это очень трудно симулировать, поэтому робот должен учиться в реальном мире, взаимодействуя с настоящейДженгой. Ключевая задача состоит в том, чтобы извлечь уроки из сравнительно небольшого числа экспериментов, используя здравый смысл об объектах и физике».
Эксперименты в разработке роботов с подобной возможностью
Родригес и его команда оснастили промышленный роботизированный манипулятор ABB IRB 20 внешней камерой, манжетой для измерения силы и мягким захватом. Затем они начали тренировать робота, заставив его выбрать блок в башне Дженга наугад, а затем выбрать определенное место в этом блоке, чтобы подтолкнуть его очень точно. Каждый раз, когда это происходило, подключенный компьютер записывал визуальные и силовые измерения и классифицировал каждую попытку как успешную или неудачную.
Команда говорит, что примерно за 300 попыток, используя эту комбинацию тактильной и визуальной обратной связи, робот смог использовать моделирование, чтобы предсказать, какие блоки будет труднее перемещать, чем другие, а какие могут привести к падению башни. Это было сделано путем сортировки результатов по кластерам. «Робот строит кластеры, а затем изучает модели для каждого из этих кластеров, вместо того, чтобы изучать модель, которая фиксирует абсолютно все, что может произойти», - говорит Родригес.
Затем команда сравнила производительность обученного робота с людьми-игроками и обнаружила, что их успехи в поддержании башни в вертикальном положении при удалении деревянных блоков невелики. Они также протестировали его вместе с алгоритмами машинного обучения, играя в компьютерное моделирование игры, и обнаружили, что их кривая обучения более эффективна.
«Мы предоставляем этим алгоритмам ту же информацию, которую получает наша система, чтобы увидеть, как они учатся играть в Jenga на одинаковом уровне», - говорит соавтор исследования МикельОллер.- «По сравнению с нашим подходом, эти алгоритмы должны исследовать на несколько порядков больше башен, чтобы изучить игру».
Применение подобных технологий в будущем
Хотя робот, играющий на Jenga, впечатляет, это не финал. Исследователи надеются, что робототехнические технологии могут быть использованы в средах, где требуется осторожный взгляд и деликатное прикосновение, таких как отделение переработки от отходов и сборка потребительских товаров.
«На линии сборки мобильных телефонов практически на каждом этапе ощущение защелкивания или резьбового винта происходит от силы и прикосновения, а не от зрения», - говорит Родригес. -«Изучение моделей для этих действий - главное преимущество для такого рода технологий».
Автор статьи: Виктор Булавин
Похожие статьи:

 Сборочный робот
Сборочный робот

 Онлайн супермаркет представляет первый прототип ARMAR-6 помощника по обслуживанию роботов
Онлайн супермаркет представляет первый прототип ARMAR-6 помощника по обслуживанию роботов
 Цилиндрический тип робота
Цилиндрический тип робота

 Используется в японских магазинах Робот-штабелер Model-T с VR-управлением
Используется в японских магазинах Робот-штабелер Model-T с VR-управлением

 ABB роботы
ABB роботы

 Робот пожарник WALK-MAN
Робот пожарник WALK-MAN







