
- Главная
- >
- Новости
- >
- Робот HERMES управляется специальным жилетом который помогает ему оставаться сбалансированными
Робот HERMES управляется специальным жилетом который помогает ему оставаться сбалансированными
Инженеры из Массачусетского технологического института и Университета Иллинойса в Урбана-Шампейн разрабатывают телеуправляемого робота, который способен управляться благодаря жилету

Инженеры из Массачусетского технологического института и Университета Иллинойса в Урбана-Шампейн разрабатывают телеуправляемого робота, который способен управляться благодаря жилету, надеваемому на человека.
Оснащенный маленькими высокоэффективными роботизированными механизмами и электромеханической системой (HERMES), двуногий робот составляет треть от взрослого человека и может бегать, и передвигаться синхронно с пользователем. Когда дело доходит до борьбы со стихийными бедствиями, у роботов достаточно большой потенциал, но им еще предстоит пройти долгий путь, прежде чем мы увидим гуманоидных пожарных роботов, бросающихся в горящие здания.
Проблемы роботов-гуманоидов
Одна из самых больших проблем заключается в том, что, хотя современные роботы могут бегать, прыгать и делать сальто назад, их чувство баланса все еще ужасно. Поэтому, если двуногий робот попытается открыть дверь, он скорее всего не сможет удержаться на ногах и упадет. Задачи, выполняемые нами каждый день, к примеру ходьба, бег, открывание двери, на самом деле являются очень сложными процессами уравновешивания сил.

Чтобы помочь двуногим роботам сохранять равновесие и «укорениться» в своей активной деятельности, профессор механики и технических наук Университета Иллинойса Жоао Рамос и профессор Сангбае Ким из Массачусетского технологического института разработали Little HERMES.
Немного о Little HERMES
«На создание прототипа нас вдохновило то, как в 2011 году в Тохоку, Японии, произошло землетрясение, цунами и последующая катастрофа на АЭС «Фукусима-дайчи»», - говорит Рамос. «Мы думали, что, если бы робот мог войти на электростанцию после катастрофы, все могло бы закончиться иначе. Этот инцидент был тревожным звонком для сообщества робототехники». Основная особенность Little HERMES - механизм принудительной обратной связи.
Оператор носит жилет, который не только заставляет робота двигаться синхронно с пользователем, но также позволяет оператору чувствовать давление, действующее на робота, практически в реальном времени и инстинктивно реагировать - разделяя чувство равновесия человека с машиной. Ключом к функционированию этой системы является жилет, надетый оператором, который подает сигналы пользователю.

В таком случае пользователь чувствует то, что робот теряет равновесие и восстанавливает его. Это означает, что робот не только может с легкостью передвигаться, но и даже толкать предметы, либо еще как-то взаимодействовать с ними. «Если робот начинает падать, пользователь чувствует это благодаря жилету», - сказал Рамос. «Человек должен предпринять действия, чтобы противодействовать этому, и робот повторит эти действия, синхронно, предотвратив свое падение».
В настоящее время Little HERMES работает с прямым проводным управлением, хотя следующим шагом является внедрение беспроводного управления, а также расширение области применения технологии принудительной обратной связи.

«Мы также планируем разработать устройства обратной связи между роботом и человеком для других частей тела, таких как ноги и руки», - говорит Рамос. «Кроме того, все, что мы разработали до сих пор, не ограничивается двуногими роботами; любая технология, легко переносится на другие мобильные системы, такие как четвероногие и колесные роботы».
Автор статьи: Виктор Булавин
Похожие статьи:

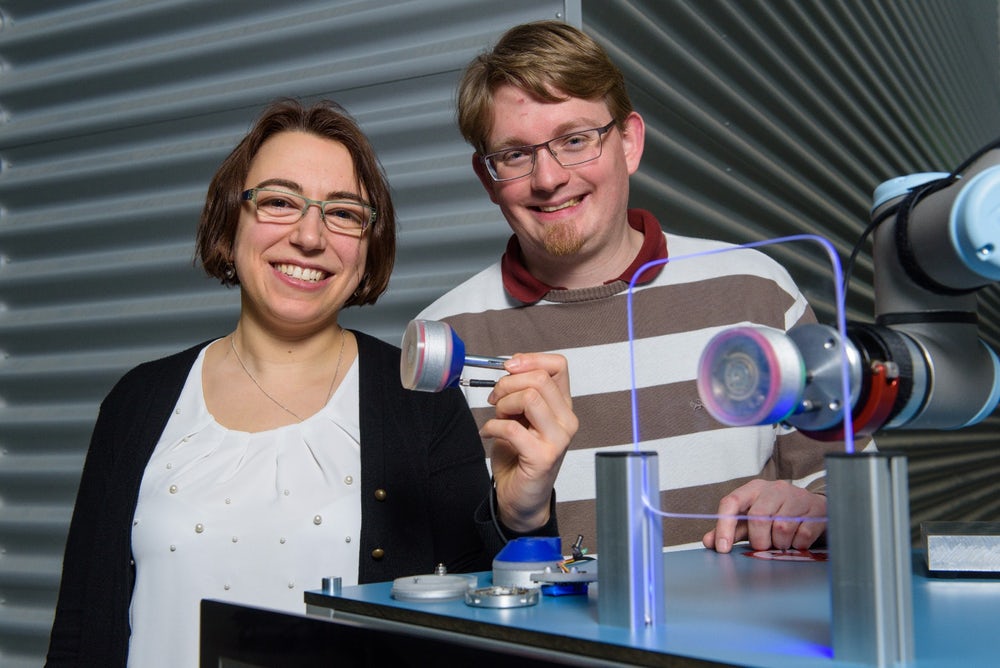
 Для безопасной и дешевой сборки преобразователей частоты создан - Cobots
Для безопасной и дешевой сборки преобразователей частоты создан - Cobots
 Роботизированный вакуумный захватчик с искусственной мышцой
Роботизированный вакуумный захватчик с искусственной мышцой

 Создание робота миллиметрового размера, который выглядит как паук
Создание робота миллиметрового размера, который выглядит как паук
 Способная переноситься при помощи дронов и насекомых это крошечная сенсорная система
Способная переноситься при помощи дронов и насекомых это крошечная сенсорная система

 Робот-художник создает изображения с помощью намотки нити
Робот-художник создает изображения с помощью намотки нити

 Технология распознавания NEC распознает людей даже когда их лица скрыты
Технология распознавания NEC распознает людей даже когда их лица скрыты







