
Создание робота миллиметрового размера, который выглядит как паук
Исследовательская группа из двух гарвардских инженерных школ и Бостонского университета (BU) придумала средства проектирования и создания мягких роботов миллиметрового размера с несколько более крупными чертами.
 Представьте себе робота с мягким телом, по форме напоминающим паука, размером не больше копейки. Это то, что команда исследователей под руководством Гарварда произвела с использованием нового метода производства, который может создавать мягкие роботы миллиметрового масштаба, говорится в статье в Science Daily.
Представьте себе робота с мягким телом, по форме напоминающим паука, размером не больше копейки. Это то, что команда исследователей под руководством Гарварда произвела с использованием нового метода производства, который может создавать мягкие роботы миллиметрового масштаба, говорится в статье в Science Daily.
Зачем это нужно?
Исследователи считают, что мягкие роботы, носящие форму животных, могут быть отправлены в районы, к которым люди не могут получить доступ или обычные роботы с твердыми телами. К таким локациям относятся внутренние органы человеческого тела, пространства, которые слишком тесны и хаотичны для несгибаемых каркасов жестких роботов или крайне небезопасны для человека.
Предыдущее ограничение на размер мягких роботов было сантиметровым. Невозможно было построить что-то меньшее, не жертвуя гибкостью и множеством функций, которые определяют мягкого робота.
Исследовательская группа из двух гарвардских инженерных школ и Бостонского университета (BU) придумала средства проектирования и создания мягких роботов миллиметрового размера с несколько более крупными чертами. Они использовали свой новый метод изготовления, чтобы сделать робота, основанного на крошечном и красочном австралийском павлиньем пауке (Maratus volans).
Мягкий робот-паук изготовлен из эластичного материала. Материал можно сформировать, он позволяет легко двигаться, и ярко окрашен.
Изготовление мягких миллиметровых роботов-пауков из силикона
Исследователь BU доктор Шейла Руссо сказал, что маленькие роботы-очень простые устройства. Большинство из них ограничены одной степенью движения. Они могут только служить как привод для одних специфических формы или типа деятельности.
”В области мягких роботизированных устройств этот новый подход к изготовлению может проложить путь к достижению таких же уровней сложности и функциональности в этом небольшом масштабе, как и у их жестких аналогов",-объяснил Роберт Вуд, доктор философии, который служил соавтором исследования. “В будущем это также может помочь нам эмулировать и понимать структурно-функциональные отношения у мелких животных гораздо лучше, чем жесткие роботы.”
Он и его команда Harvard-BU назвали своих новых мягких роботов Микрофлюидными оригами для реконфигурируемых пневматических/Гидролических (MORPH) машин. Мягкие тела роботов состояли из дюжины слоев эластичного силикона.
Каждый слой был изготовлен в технике мягкой литографии. В слой интегрировали сеть полых микрофлюидных каналов, которые затем лазером вырезали из формы. Индивидуальные слои после этого были скреплены совместно для того чтобы сделать структуру мягкого робота.
Крошечные медицинские роботы могут однажды исследовать тела пациентов
Давление заставило локальные части силиконовых слоев принять свою окончательную форму.
Когда смола затвердела, она зафиксировала силикон в форму. Это позволило роботу сохранить свою физическую мягкость при сохранении жесткой формы.
”Мы можем точно контролировать этот оригами-подобный процесс складывания, изменяя толщину и относительную консистенцию силиконового материала, прилегающего к каналам, через разные слои или путем лазерной резки на разных расстояниях от каналов",-сказал автор-корреспондент доктор Томмазо Ранзани.
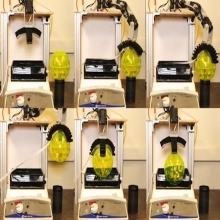
Остальные микрофлюидные каналы выполняли разные роли. Некоторые из них использовались в качестве приводов, которые могли перемещать структуры ног робота-паука для имитации ходячих движений. Другие копировали красочные узоры пауков-павлинов, прокачивая цветные жидкости через глаза и живот робота-паука. Робототехнические специалисты верят что процесс MORPH смог помочь медицинским роботам в ближайшее время.
Они предлагают что малые и гибкие роботы смогли вползти в человеческое тело для того чтобы поддержать медицинские деятельности как эндоскопия и микрохирургия.
Автор статьи: Виктор Булавин
Похожие статьи:

 Amazon Echo: виртуальный помощник или правительственный шпион?
Amazon Echo: виртуальный помощник или правительственный шпион?
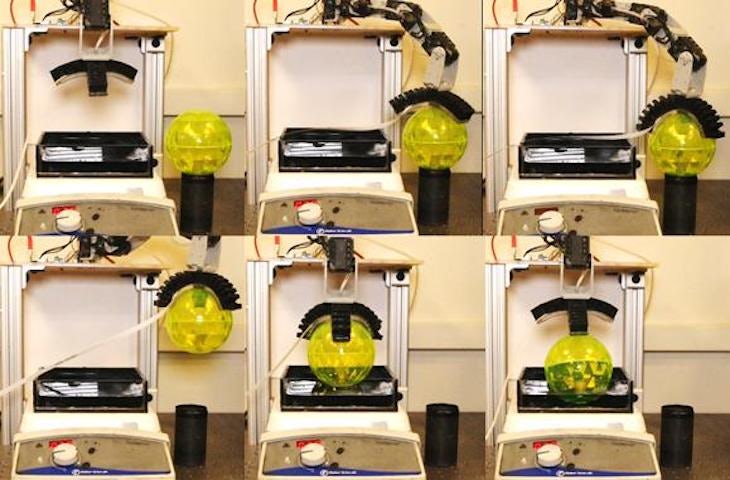 Проверяет воду на наличие опасных химикатов роботизированный манипулятор
Проверяет воду на наличие опасных химикатов роботизированный манипулятор

 Студент разрабатывает приложение Plant MD для диагностики заболеваний растений
Студент разрабатывает приложение Plant MD для диагностики заболеваний растений

 10 самых финансируемых роботов на Indiegogo
10 самых финансируемых роботов на Indiegogo
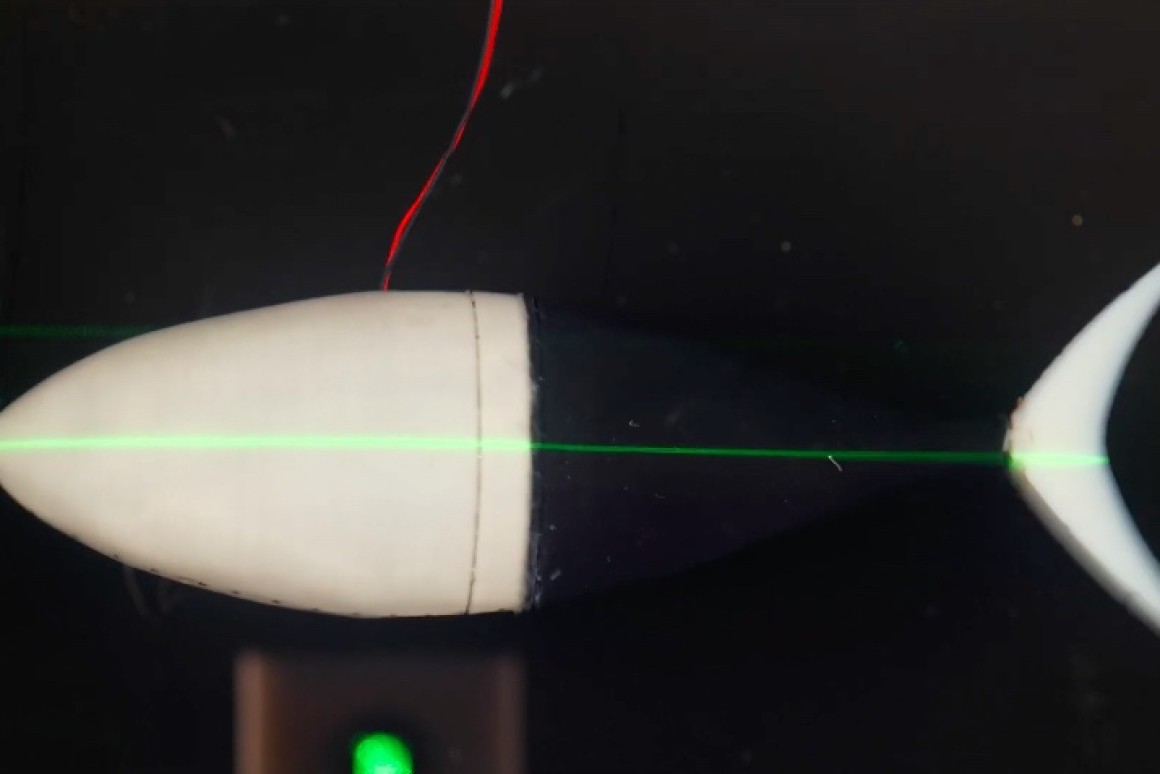 Недавно разработанный Tunabot способен плавать так же быстро как настоящий тунец
Недавно разработанный Tunabot способен плавать так же быстро как настоящий тунец

 Робот-певец и автор песен Shimon выпустит первый свой музыкальный альбом
Робот-певец и автор песен Shimon выпустит первый свой музыкальный альбом







