
Живые мышцы выращенные в лабораторных помогают роботам двигаться
Японские исследователи теперь разработали новый способ интеграции живой мышечной ткани на роботизированный скелет и сделали его реалистично движущимся.
 Когда дело доходит до создания роботов, зачем начинать с нуля, когда природа уже разработала лучшие материалы и детали, чем наши искусственные? Японские исследователи теперь разработали новый способ интеграции живой мышечной ткани на роботизированный скелет и сделали его реалистично движущимся.
Когда дело доходит до создания роботов, зачем начинать с нуля, когда природа уже разработала лучшие материалы и детали, чем наши искусственные? Японские исследователи теперь разработали новый способ интеграции живой мышечной ткани на роботизированный скелет и сделали его реалистично движущимся.
Случаи интеграции живой мышечной ткани на скелет робота
Это не первый случай, когда ученые смешивают роботов и живые клетки. В 2016 году исследователи использовали клетки сердца крысы, прикрепленные к скелету, чтобы создать «биоробот», которым можно было бы управлять светом. Вскоре после этого другая команда сделала робота из морских мускулов.
Новый проект
Для нового проекта исследователи из Токийского университета выросли живые мышцы на роботизированном скелете. Они основываются на листах гидрогеля, содержащие миобласты или клетки-предшественники мышц. Они прикрепляются к опорным точкам на скелете и сформированы так, что мышцы будут расти, как волокна.
Электроды размещаются, чтобы стимулировать мышцы к сокращению, что позволило роботу двигаться, согнувшись в суставе, как палец. В предыдущих исследованиях искусственные мышцы начинали сжиматься слишком долго, но исследователи из Токио обошли эту проблему, организовав их в естественной «оппозиции», где две мышцы работают вместе, чтобы достичь одной и той же цели по-разному. Например, когда одна сжимается и тянет конечность, другая расширяется и толкает его в одном направлении.
«Как только мы построили мускулы, то успешно использовали их в качестве антагонистических пар в роботе, причем одна из них сокращалась, а другая расширялась, как и в теле», - говорит Сёдзи Такеучи, автор исследования. «Тот факт, что они оказывали противоборствующие силы друг другу, мешал им сокращаться и изнашиваться, как в предыдущих исследованиях».
Чтобы проверить дизайн, исследователи сделали своего рода палец робота, который мог сгибаться до 90 градусов при электрическом включении. Один из этих роботов смог подобрать и переместить кольцо, в то время как два вместе могли собрать квадратную рамку. Из-за антагонистического дизайна мышцы могут функционировать в течение недели.
Роботы смогу полностью имитировать человеческие движения
«Наши результаты показывают, что, используя это антагонистическое расположение мышц, эти роботы могут имитировать действия человеческого пальца», - говорит Юя Моримото, ведущий автор исследования. «Если мы сможем объединить больше этих мышц в единое устройство, мы сможем воспроизвести сложное мускульное взаимодействие, позволяющее функционировать рукам, и другим частям тела».
Робота можно увидеть в действии в видео по ссылке
Автор статьи: Виктор Булавин
Похожие статьи:

 Wi-Fi-Enabled Roombas получила голос от Alexa Voice Control
Wi-Fi-Enabled Roombas получила голос от Alexa Voice Control

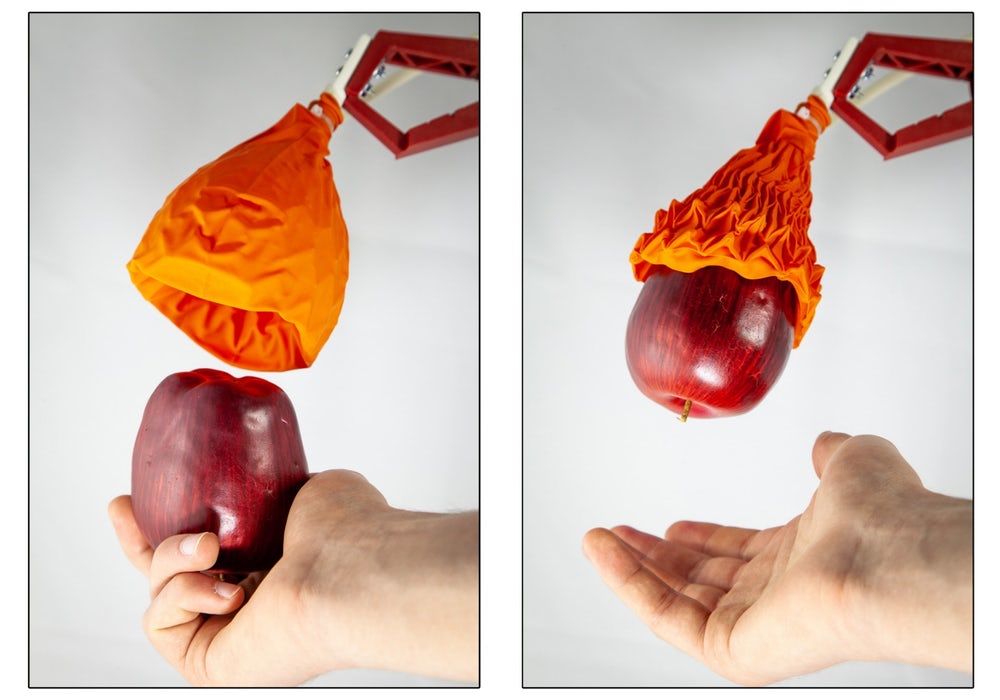 Новый роботизированный захват MIT Magic Ball работает как венерина мухоловка
Новый роботизированный захват MIT Magic Ball работает как венерина мухоловка

 Железный Человек для защиты от радиоактивных излучений
Железный Человек для защиты от радиоактивных излучений

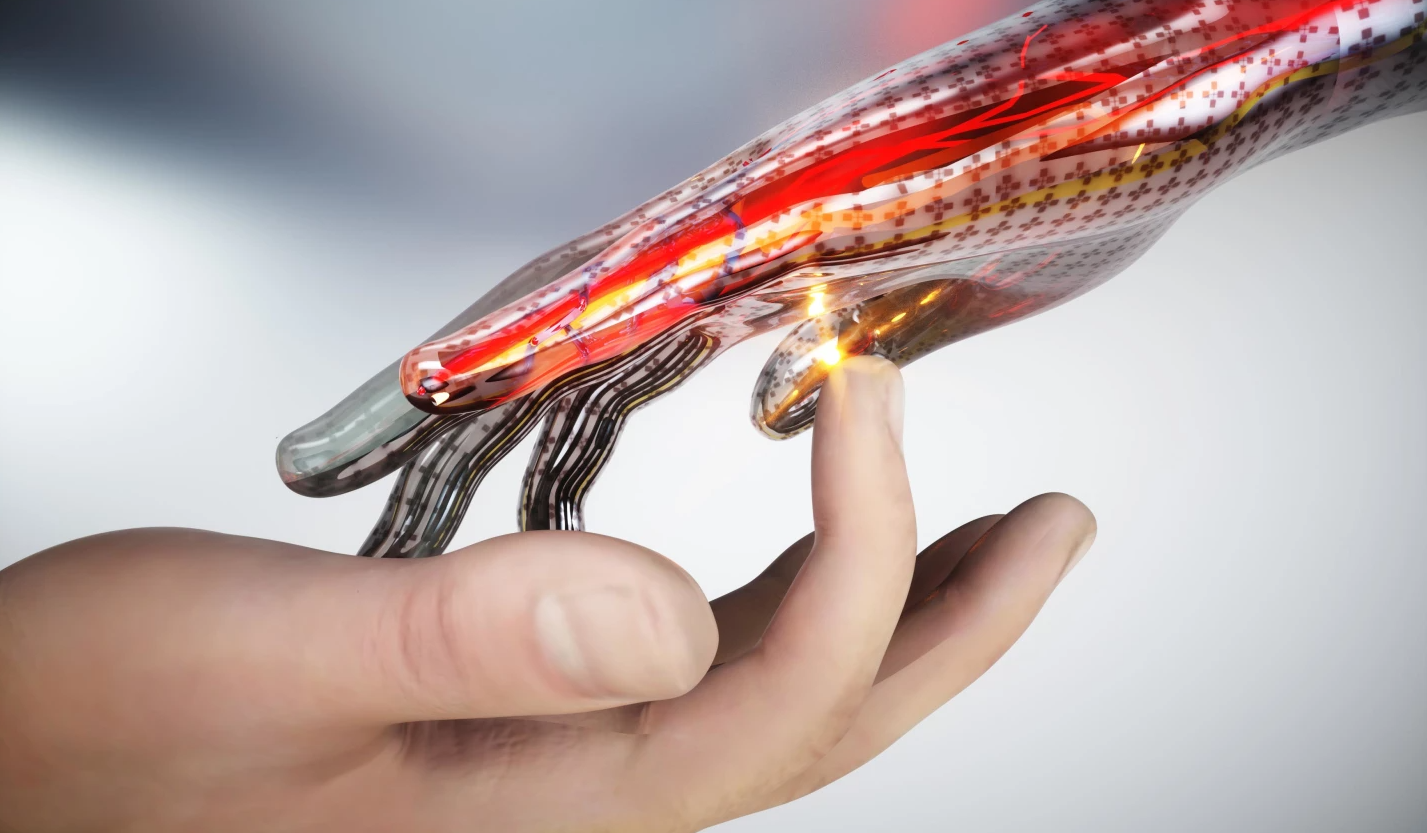 Имитирует человеческую реакцию на боль первая в своем роде электронная кожа
Имитирует человеческую реакцию на боль первая в своем роде электронная кожа

 С Minecraft Earth и дополненной реальностью теперь можно строить в реальном мире
С Minecraft Earth и дополненной реальностью теперь можно строить в реальном мире
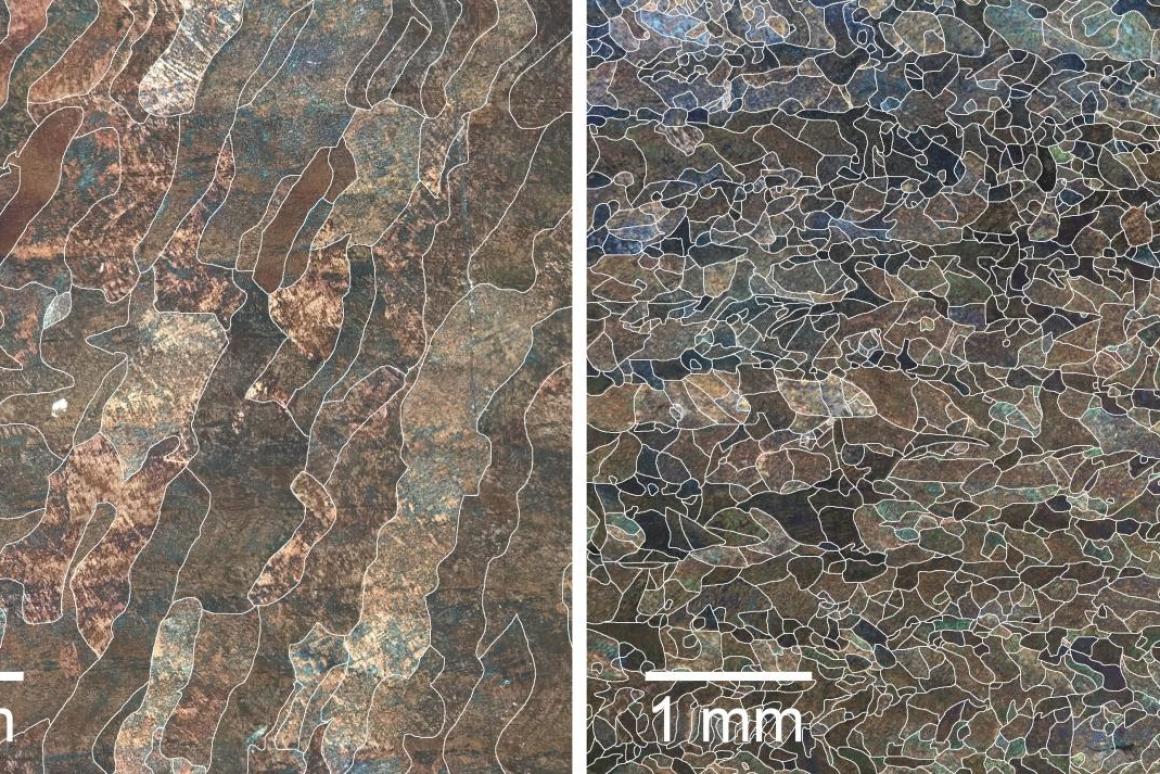 Прочность металлов напечатанных на 3D-принтере способен увеличить ультразвук
Прочность металлов напечатанных на 3D-принтере способен увеличить ультразвук







