
Автономная система PLUMES улучшает отбор проб окружающей среды в морских зонах
Автономная система, изобретенная исследователями в Массачусетском технологическом институте и Океанографическом институте Вудс-Хоул (WHOI), эффективно обнаруживает места для взятия проб воды

Автономная роботизированная система, изобретенная исследователями в Массачусетском технологическом институте и Океанографическом институте Вудс-Хоул (WHOI), эффективно обнаруживает наиболее интересные с научной точки зрения труднодоступные места в водоемах для взятия проб воды. Ученые-экологи часто заинтересованы в сборе проб в самых интересных местах или, как еще их называют, «максимумах» в окружающей среде.
Одним из примеров может быть источник утечек химических веществ, где концентрация является самой высокой и в основном не испорченной внешними факторами. Но максимумом может быть любая величина, которую исследователи хотят измерить, например, глубина воды или части кораллового рифа, наиболее подверженные воздействию воздуха. Из-за огромных территорий, которые покрывают подобные роботы страдает точность и качество образцов.
Обычно роботы движутся взад и вперед, как газонокосилки, чтобы покрыть область, исследование которой может затянуться ради сбора стоящих образцов. Некоторые роботы чувствуют и следуют за высококонцентрированными тропами к источнику утечки. Но они могут быть введены в заблуждение. Например, химические вещества могут застаиваться и накапливаться в расщелинах вдали от источника. Роботы могут идентифицировать эти высококонцентрированные пятна непосредственно как сам источник.
Представление PLUMES общественности
В документе, представленном на Международной конференции по интеллектуальным роботам и системам (IROS), исследователи описывают «PLUMES», систему, которая позволяет автономным мобильным роботам отыскать максимум гораздо быстрее и эффективнее. PLUMES использует вероятностные методы для прогнозирования того, какие пути могут привести к максимуму, при навигации по препятствиям, смещению потоков и другим переменным.
Когда он собирает образцы, он взвешивает то, что он узнал, чтобы определить, следует ли продолжать идти по многообещающему пути или искать другие, которые могут содержать более ценные образцы. Важно отметить, что благодаря PLUMES робот достигает своего места назначения, так и не попав в эти хитрые места с высокой концентрацией. «Это важно, потому что легко думать, что вы нашли золото, но на самом деле вы нашли пирит», - говорит соавтор Виктория Престон, аспирант в Лаборатории компьютерных наук и искусственного интеллекта (CSAIL).
Исследователи построили роботизированную лодку с приводом PLUMES, которая успешно обнаружила наиболее многообещающую коралловую головку на Окаймляющем рифе Беллаирс в Барбадосе - то есть он расположен в самом мелком месте - что полезно для изучения того, как воздействие солнца влияет на коралловые организмы.
В 100 смоделированных испытаниях в разнообразных подводных средах виртуальный робот PLUMES также последовательно собирал в 7–8 раз больше выборок максимумов, чем традиционные методы покрытия за выделенные промежутки времени. «PLUMES проводит минимальное количество исследований, необходимых для нахождения максимума, а затем быстро концентрируется на сборе там ценных образцов», - говорит соавтор Женевьева Фласполер, аспирант CSAIL.
Вместе с Престоном и Фласполером руку к разработке проекта приложили: Анна П.М. Мишель и Йогеш Гирдхар, оба ученые из Отдела прикладной физики и инженерии океана, и Николас Рой, профессор CSAIL и кафедры аэронавтики и космонавтики.
Нахождение компромисса между старой информацией и будущими исследованиями
Ключевым пониманием PLUMES было использование методов от вероятности к рассуждению для навигации по общеизвестно сложному компромиссу между использованием того, что узнали об окружающей среде, и исследованием неизвестных областей, которые могут быть более ценными.
«Основная проблема в поиске максимума - позволить роботу сбалансировать использование информации из мест, которые он уже знает, с высокой концентрацией, и исследовать места, о которых он мало знает», - говорит Фласполер. «Если робот исследует слишком много, он не соберет достаточно ценных образцов. Если место недостаточно изучено, томы можем упустить что-то ценное там».
Особый метод сканирования и алгоритм выполнения работ
Высадившись в новую среду, робот на базе PLUMES использует вероятностную статистическую модель, называемую гауссовским процессом, для прогнозирования переменных среды, таких как химические концентрации, и оценки неопределенностей восприятия. Затем PLUMES генерирует распределение возможных путей, по которым робот может идти, и использует оценочные значения и неопределенности, чтобы ранжировать каждый путь по тому, насколько хорошо он позволяет роботу исследовать территорию.
Сначала PLUMES выберет пути, по которым будет исследовать окружающую среду. Каждый образец, однако, предоставляет новую информацию о целевых значениях в окружающей среде - таких как пятна с самыми высокими концентрациями химикатов или образцы с мелководья.
Модель гауссовского процесса использует эти данные, чтобы сузить возможные пути, по которым робот может следовать из своего заданного положения для выборки из мест с еще более высоким значением. PLUMES использует новую целевую функцию - обычно используемую в машинном обучении для максимизации вознаграждения - чтобы определить, должен ли робот использовать прошлые знания или исследовать новую область.
Галлюцинирующие дорожки
Решение о том, где собирать следующий образец, зависит от способности системы «галлюцинировать» все возможные будущие действия из ее текущего местоположения. Для этого он использует модифицированную версию поиска по методу Монте-Карло (MCTS), метода планирования пути, популярного для питания систем искусственного интеллекта, которые используются в играх. MCTS использует дерево решений - карту связанных узлов и линий - для имитации пути или последовательности ходов, необходимых для достижения окончательного выигрышного действия.
Но в играх пространство для возможных путей конечноменьше. В неизвестных средах с изменяющейся динамикой в реальном времени пространство фактически бесконечно, что делает планирование чрезвычайно трудным. Исследователи разработали «MCTS непрерывного наблюдения», которая использует гауссовский процесс и новую целевую функцию для поиска в этом громоздком пространстве возможных реальных путей.
Корень этого дерева решений MCTS начинается с узла «убеждения», который является следующим непосредственным шагом, который может сделать робот. Этот узел содержит всю историю действий и наблюдений робота до этого момента. Затем система расширяет дерево от корня до новых линий и узлов, просматривая несколько шагов будущих действий, которые ведут к исследованным и неизведанным областям.
Затем система имитирует то, что произойдет, если она взяла выборку из каждого из этих вновь созданных узлов, основываясь на некоторых шаблонах, которые она изучила из предыдущих наблюдений. В зависимости от значения конечного моделируемого узла, весь путь получает награду, причем более высокие значения равняются более многообещающим действиям. Баллы за вознаграждение по всем путям возвращаются к корневому узлу.
Робот выбирает путь с наибольшим количеством очков, и работает уже в том направлении. Затем он использует реальные данные для обновления своей модели процесса Гаусса и повторяет процесс «галлюцинации». «Пока мы не исследуем все, мы не можем с уверенностью сказать, что полностью изучили область», - говорит Фласполер. «Когда он, наконец, сходится в месте, которое он оценивает, как максимум, потому что он не может галлюцинировать более высокое значение вдоль пути, он затем прекращает исследовать».
В настоящее время исследователи сотрудничают с учеными из WHOI, чтобы использовать роботов на платформе PLUMES для локализации химических зон на вулканических участках и изучения выбросов метана в тающих прибрежных устьях Арктики. Ученые заинтересованы в источнике химических газов, выбрасываемых в атмосферу, но эти полигоны могут простираться на сотни квадратных миль.
«Они могут использовать PLUMES, чтобы тратить меньше времени на изучение этой огромной территории и действительно сосредоточиться на сборе ценных с научной точки зрения образцов», - говорит Престон.
Автор статьи: Виктор Булавин
Похожие статьи:
 Новая 3D-технология печатает ткани человека с капиллярами
Новая 3D-технология печатает ткани человека с капиллярами
 Созданные по подобию насекомых полумягкие флексоскелетные роботы
Созданные по подобию насекомых полумягкие флексоскелетные роботы

 Moog выпустили свой первый аналоговый синтезатор
Moog выпустили свой первый аналоговый синтезатор

 Определять местонахождение злонамеренных операторов беспилотников обучили ученые глубокую нейронную сеть
Определять местонахождение злонамеренных операторов беспилотников обучили ученые глубокую нейронную сеть

 Создание робота миллиметрового размера, который выглядит как паук
Создание робота миллиметрового размера, который выглядит как паук
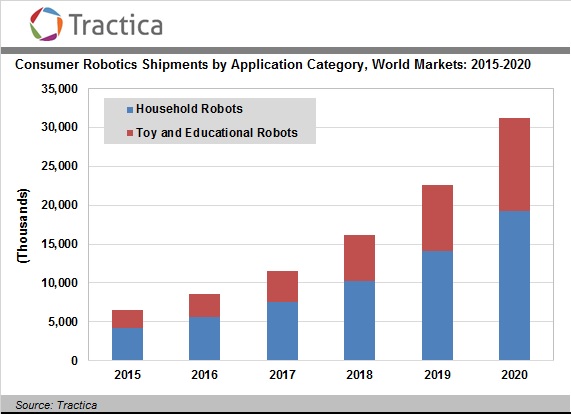 100 млн. бытовых роботов будут проданы за следующие 5 лет
100 млн. бытовых роботов будут проданы за следующие 5 лет







