
- Главная
- >
- Роботы
- >
- Роботы игрушки
- >
- Комплекты роботов Vex
Комплекты роботов Vex
Система проектирования роботов Vex - это еще один комплект для создания роботов, который позволяет вам создавать множество роботов с использованием деталей, датчиков и других вещей, которые идеально подходят друг к другу, как вы себе представляете. Хотя я назвал его «комплектом», который плохо описывает его. Описание производителя - «системный дизайн» гораздо более уместно.

Таким образом, система роботов Vex заслуживает того, чтобы ее называли так. Хотя есть некоторые комплекты с полным роботом, которые вводят вас в Vex, есть также различные компоненты Vex, которые могут быть легко использованы для ваших собственных проектов в области робототехники, таких как конструкционные детали, колеса, гусеницы и т. Д. Однако истинную силу этой системы можно увидеть, если все компоненты робота Vex используются вместе. Это также отличный способ узнать о создании робота и его основных концепциях. Хотя это может показаться незначительным для опытных роботов-строителей, этот опыт может быть бесценным для всех остальных. Позвольте мне рассказать вам больше о самой системе проектирования роботов Vex, доступных наборах Vex, вариантах программирования и некоторых других вещах, которые мне придут в голову.
Система
Чтобы лучше объяснить основные концепции построения роботов и сохранить все красивое и аккуратное, система Vex делится на подсистемы. Так вот, как производитель объясняет все в «руководстве для настоящих изобретателей», я тоже буду придерживаться этого.
Структурная подсистема
Как вы можете догадаться, структурная подсистема включает в себя структурные части - все те части, которые делают тело робота. Шасси, если хотите. Таким образом, это стальные или алюминиевые детали из листового металла с предварительно изготовленными квадратными отверстиями и совместимыми аппаратными средствами - винтами, гайками и т. Д.
Эти детали из листового металла предназначены для модификации, поэтому их можно легко согнуть и нарезать, чтобы они соответствовали вашим потребностям. Вот почему я упомянул выше, что структурные части Vex могут использоваться и для других проектов робототехники. Структурная подсистема включает в себя потолочные стойки, которые могут использоваться для создания многоплатформенных роботов.
Подсистема движения
Эта подсистема включает в себя все, что помогает двигаться, подшипникам, квадратным валам, роликам, колесам, ступенькам и двигателям. Существуют различные механизмы, которые можно использовать для увеличения крутящего момента и уменьшения скорости или наоборот. Колеса Vex имеют квадратные отверстия в центре, поэтому вы можете использовать их с квадратными валами. Остерегайтесь, хотя - если слишком много силы приложено, вал может выскользнуть и повредить шестерню. Валы квадратные с закругленными углами. Таким образом, они могут свободно вращаться в подшипнике, все еще перенося усилие на шестерни. Доступны колеса различного размера, в том числе колеса omni (колеса, которые могут перемещаться в любом направлении) и ступени. В подсистеме движения имеются также два типа двигателей: серводвигатели и двигатели с непрерывным вращением (сервоприводы непрерывного вращения). Если вы не знаете разницы между ними, я кратко опишу его. Регулярные двигатели все время вращаются, поэтому они могут обеспечить движение, например. Сервомоторы, с другой стороны, вращаются в определенной степени - например, поднятие крана.
Подсистема питания
Подсистема питания - это ... батареи. Вы можете использовать обычные перезаряжаемые батареи AA с держателем батареи, или вы можете использовать аккумуляторные батареи vex robotics. Что касается перезаряжаемых батарей, вам нужно будет купить 14 батарей AA - 6 батарей для вашего робота (микроконтроллер) и 8 для передатчика, если вы хотите управлять самим ботом. Другой вариант - вышеупомянутые перезаряжаемые аккумуляторные батареи. Требуется аккумуляторная батарея на 7,2 вольт для робота и блок питания 9,6 В для передатчика. Если вы выберете аккумуляторы AA - не используйте щелочные ячейки для робота, NiCd лучше подходят для этого.
Подсистема датчиков
Как вы понимаете, подсистема Sensor системы дизайна Vex для робототехники включает в себя датчики - устройства, которые «читают» окружающую среду. Таким образом, робот может реагировать на различные явления как он будет запрограммирован. Итак, какие датчики существуют в системе роботов Vex? Есть два сенсорных переключателя - концевой выключатель и выключатель бампера. Один реагирует на легкое прикосновение, в то время как другое больше похоже на датчик удара. Существуют также другие датчики - акселерометр, датчик освещенности, датчик слежения за инфракрасной линией, ультразвуковой дальномер, оптический вал и потенциометр. Кодер оптического вала позволяет измерять количество оборотов и направление вращающегося вала, а потенциометр позволяет измерять угловое положение чего-либо.
Подсистема управления
В то время как другие наборы роботов часто фокусируются главным образом на автономных роботах, Vex обращает внимание также на роботы с дистанционным управлением. Вы говорите, что «настоящие» роботы являются только автономными? Ну, есть эти роботы с дистанционным управлением, правда? Насколько я знаю, никто не сомневается в их ... роботизированных чертах.

Хорошо, сейчас я отброшу философские вопросы. Таким образом, как вы понимаете, компонент дистанционного управления достаточно прочен в системе проектирования роботов Vex. Подсистема управления включает в себя передатчик, приемник и разделитель сигналов. Приемник должен быть подключен к микроконтроллеру, если вы хотите, чтобы ваш робот также выполнял запрограммированное поведение. Если вы просто хотите самостоятельно управлять своим роботом без автономного поведения, вы можете использовать разделитель сигналов. Разделитель сигналов в основном передает каналы передатчика на 6 устройств PWM (двигатели и сервомоторы). Поскольку передатчик достаточно умный, последней конфигурации достаточно, если вы хотите построить роботa с дистанционным управлением - параметры конфигурации позволяют вам управлять 6 двигателями по вашему желанию. Чтобы избежать ситуаций с помехами, доступны различные частотные кристаллы.
Логическая подсистема
Логическая система делает мышление. Как вы понимаете, это микроконтроллер Vex. Вы можете управлять двигателями, получать обратную связь от датчиков и выполнять с ними программы. Он поставляется с программным обеспечением по умолчанию для простой работы робота. Микроконтроллер имеет 8 выходов ШИМ для двигателей и сервомоторов, 16 аналоговых / цифровых портов ввода / вывода, а также 6 входов прерываний (некоторые датчики используют их вместо аналоговых / цифровых входов). В аналоговом режиме входы имеют 10-битное разрешение. Программное обеспечение по умолчанию позволяет вам создать простого робота с двумя (или четырьмя) двигателями и двумя переключателями обнаружения препятствий. Затем можно запускать его либо в режиме, управляемом пользователем, либо в автономном режиме, где он блуждает и пытается избежать препятствий на своем пути.
программирование
Конечно, дистанционно управляемые роботы классные, программное обеспечение по умолчанию в микроконтроллере Vex robotics также может выполнять некоторые задачи. Тем не менее, будет момент, когда вы захотите, чтобы ваш робот проявил немного более сложное поведение. Очевидно, что когда наступит этот момент, вы захотите перепрограммировать программное обеспечение по умолчанию. На данный момент существует три «официальных» среды программирования для системы проектирования роботов Vex. А именно, это - EasyC (и EasyC PRO), RobotC и MPLAB. EasyC - это подходящий вариант для начинающих в программировании. Это для вас, если вам нравится идея графической среды программирования, где вы можете перетаскивать модули. Рядом с этими модулями вы увидите код на C, чтобы вы могли чему-то научиться. Глобальные константы и переменные, а также функции ветвления доступны в EasyC.
RobotC - это промежуточное решение с мощным отладчиком, компилятором и редактором исходного кода. В качестве расширенного метода - MPLAB IDE, вы можете напрямую запрограммировать микроконтроллер PIC, находящийся внутри микроконтроллера Vex. Во всех вышеупомянутых средах используется язык программирования C. Тем не менее, есть некоторые варианты программирования с энтузиазмом. Если вы представляете java, есть проект jvex, похоже, последнее обновление было некоторое время назад, но вы можете дать ему шанс. И если вы хотите запрограммировать Vex-роботы с помощью MSRS (Microsoft Robotics Studio), вы можете проверить этот проект.
Наборы роботов Vex
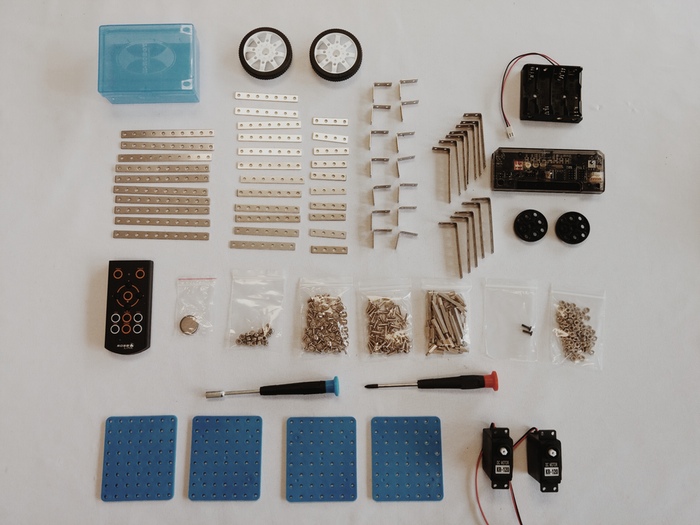
Хотя многие комплекты компонентов Vex называются наборами-комплект протектора бака, комплект двигателя, металлический комплект, я коротко опишу доступные комплекты роботов vex - комплекты стартовых роботов, как они их называют. Как вы понимаете, не все вышеперечисленное входит в эти наборы. Все пачки стартовых роботов и наборы лаборатории класса Vex построены вокруг набора робота protobot. Векс комплект protobot робот включает в себя все структурные и двигательные детали - шестерен, колес, листового металла и т. д., которые необходимы, чтобы построить две конструкции робота - робот protobot и робот неваляшка. 4 двигателя и держатель батареи не включены.
Как вы можете понять, комплект протоботов недостаточно для создания функционального робота. В это место входят пучки стартовых роботов. Есть три пучка - радиоуправление, автономное управление и двойные пучки управления. Их имена говорят сами за себя. Таким образом, комплект радиоуправления представляет собой комплект для протоботов с передатчиком и приемником, а также включенный разделитель сигналов. Автономный контроль представляет собой комплект для протоботов с микроконтроллером, программным обеспечением, а также 2 концевыми выключателями и 2 бамперными переключателями , Двойной набор управления представляет собой комбинацию этих двух.
Комплект для занятий - это, в основном, пучок с двойным управлением, с дополнительными шестернями, металлом и оборудованием, комплектом протектора танка, цепным и звездообразным комплектом и батареями Vex для обоих микроконтроллеров Vex и передатчика. Он разработан как лабораторный комплект для групповых исследований.
Автор статьи: Виктор Булавин
Похожие статьи:
 Мобильная Веб камера Rovio
Мобильная Веб камера Rovio

 Robolink 12-в-1 Robot Kit запускается на Kickstarter
Robolink 12-в-1 Robot Kit запускается на Kickstarter

 Ziro Gesture-Controlled Robot Kit запускается на Indiegogo
Ziro Gesture-Controlled Robot Kit запускается на Indiegogo
 Социальные детские роботы
Социальные детские роботы

 Игрушка для споров - робот Keepon
Игрушка для споров - робот Keepon

 Кошка робот Hasbro
Кошка робот Hasbro








Леонид:
22 Feb 2020г. в 17:48
Такой робот может стать отличным подарком для людей, которые любят робототехнику, особенно интересно, что детали робота можно интегрировать в свои разработки. Так же интересен подход к внешнему виду робота, как я понимаю, весь механизм полностью открыт, что позволяет наблюдать за его составными частями в работе. Мне нравится, что данный робот может быть в качестве радиоуправляемой модели, а может быть запрограммирован на выполнение самостоятельных действий.