
- Главная
- >
- Роботы
- >
- Космические роботы в космосе
- >
- Космические роботы покоряющие вершины и труднодоступные места
Космические роботы покоряющие вершины и труднодоступные места
Роботы могут передвигаться по равнинам и кратерам Марса, но что если мы сможем исследовать скалы, полярные шапки и другие труднодоступные места на Красной планете и за ее пределами?

Роботы могут передвигаться по равнинам и кратерам Марса, но что если мы сможем исследовать скалы, полярные шапки и другие труднодоступные места на Красной планете и за ее пределами? Разработанный инженерами Лаборатории реактивного движения НАСА в Пасадене, штат Калифорния, робот с четырьмя конечностями по имени LEMUR (Limbed Excursion Mechanical Utility Robot) может взбираться наверх, используя сотни крошечных крючков на каждом из 16 колес и искусственный интеллект (ИИ) чтобы обходить препятствия. В своем последнем полевом испытании в
Долине Смерти, штат Калифорния, в начале 2019 года, LEMUR выбрал маршрут вверх по скале, сканируя скалу на предмет древних окаменелостей из моря, которые когда-то находились на этой территории. LEMUR изначально задумывался как ремонтный робот для Международной космической станции.
Хотя проект с тех пор завершился, это помогло создать новое поколение роботов для передвижения и скалолазания. В будущих миссиях на Марс роботы с искусственным интеллектом и технологиями передвижения по скалам, разработанные на основе LEMUR, могут помочь в поиске признаков жизни в космосе. Эти роботы сейчас разрабатываются, улучшая технологию, которая однажды сможет стать частью будущих миссий в далекие миры. Вот пять из них:
Механический червь для исследования ледяных миров
Как робот будет перемещаться по скользкой, ледяной поверхности? Для Ice Worm ответ - один дюйм за раз. Адаптированный из одной конечности LEMUR, Ice Worm движется, сжимая и расширяя свое тело, как червь.
Робот взбирается на ледяные стены, цепляясь одним концом за ледяную поверхность. Он может использовать этот метод, чтобы стабилизировать себя при взятии научных образцов даже на обрыве. Робот также имеет искусственный интеллект, как у LEMUR, что позволяет ему развиваться, учась на прошлых ошибках.
Чтобы отточить свои технические навыки, руководитель проекта JPL Аарон Парнесс тестирует IceWorm на ледниках в Антарктике и ледяных пещерах на горе Св. Елены, чтобы однажды внести вклад в науку. IceWorm является частью поколения проектов, направленных на исследованиеспутников Сатурна и Юпитера, где под замерзшими корками могут быть океаны.
Крошечные альпинисты
Крошечные альпинисты - это колесные машины, достаточно маленькие, чтобы поместиться в карман пальто, но достаточно сильные, чтобы взбираться по стенам и выживать, падая с высоты в 9 футов (3 метра). Разработанные JPL для военных целей, некоторые роботы используют захват с помощью крючков, как у LEMUR, чтобы цепляться за неровные поверхности, такие как валуны и стены пещер. Другие могут цепляться за гладкие поверхности, используя технологию, вдохновленную ногами геккона. Усиливая эту гекконоподобную липкость, гибридные колеса роботов также используют электрический заряд, чтобы цепляться за стены. Инженеры JPL воссоздали клей геккона для первого поколения ботов LEMUR, используя силы Ван-дер-Ваальса, чтобы помочь ему цепляться за металлические стены даже в условиях невесомости. Микро-альпинисты с этой технологией сцепления или захвата могут отремонтировать будущий космический корабль или исследовать труднодоступные места на Луне, Марсе и за его пределами.
Астероиды
Подобно тому, как астронавты тренируются под водой для выхода в открытый космос, технология, созданная для исследования заледеневших астероидов и планет, может стать хорошим прототипом для миссий в местах с невесомостью. Подводный захват –одна из возможностей LEMUR. Однажды его можно будет отправить на операцию на астероиде или другом маленьком теле Солнечной системы. На данный момент он прикреплен к подводному исследовательскому судну Nautilus, которым управляет трастовый фонд OceanExploration, у побережья Гавайских островов, где он помогает брать пробы в глубоком океане на глубине около мили от поверхности.
Скалолазный мини-вертолет
Небольшой вертолет, работающий на солнечной энергии, сопровождающий марсоход NASA Mars 2020, полетит в качестве демонстрации технологии, проложив путь к будущим полетам на Красную планету. Но инженер JPL Араш Калантари не хочет просто летать; он разрабатывает концепцию захвата, которая позволит летающему роботу цепляться за марсианские скалы. Данный механизм адаптирован к дизайну LEMUR и, следовательно, совместим с ним: он имеет когтистые лапки со встроенными крючками, которые держат скалу так же, как птица цепляется за ветку. Находясь там, робот перезаряжал свои батареи с помощью солнечных батарей, предоставляя ему свободу передвижения во время поиска доказательств жизни.
Автор статьи: Виктор Булавин
Похожие статьи:
 «Вояджер-2» входит в межзвездное пространство
«Вояджер-2» входит в межзвездное пространство
 Beyond the Metal - расследование мягких роботов в НАСА Лэнгли
Beyond the Metal - расследование мягких роботов в НАСА Лэнгли

 НАСА разрабатывает роботов Shapeshifter для исследования спутников Сатурна
НАСА разрабатывает роботов Shapeshifter для исследования спутников Сатурна
 Теплозащитный щит Mars 2020 прошел критический рубеж
Теплозащитный щит Mars 2020 прошел критический рубеж

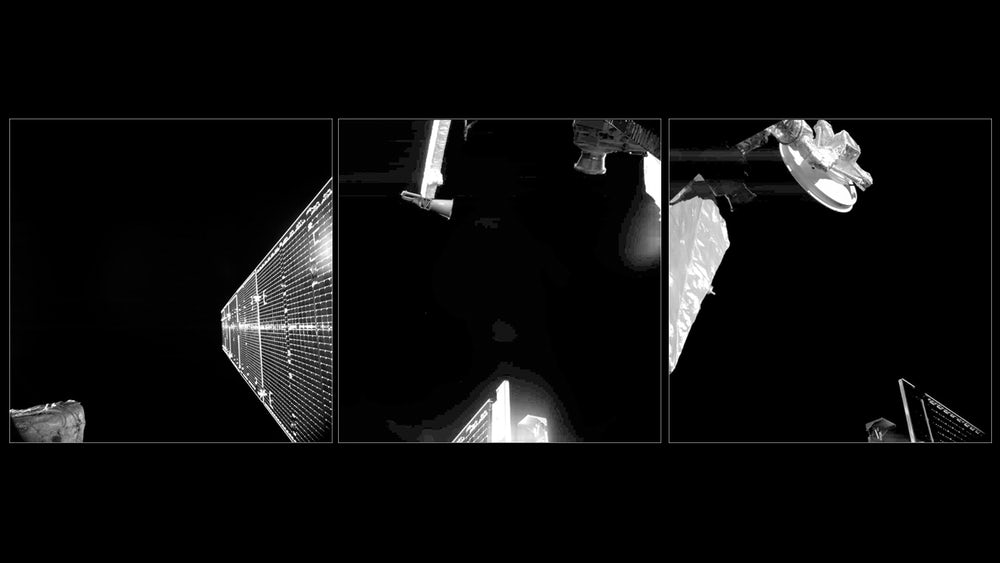 BepiColombo на пути к Меркурию: новый этап
BepiColombo на пути к Меркурию: новый этап
 NASA о важности работы людей и роботов вместе
NASA о важности работы людей и роботов вместе








Дмитрий:
25 Jul 2019г. в 14:58
Что я хочу заметить.Использование роботов как никогда актуально в средах недоступных для человека.Там где человек не выживает или выживает с трудом.Все это со временем будет развиваться только в лучшую сторону.Не за горами появление самообучаемых машин с исскуственным интелектом.Как пишут на сайтах данной тематики появление ИИ возможно в ближайшем десятилетии.