
- Главная
- >
- Роботы
- >
- Промышленные роботы
- >
- Микро-робот HAMR
Микро-робот HAMR
Сложно регулярно проверять реактивные двигатели и другие машины, что является дорогостоящим и длительным процессом. Теперь команда из Гарвардского института Висса разработала маленьких роботов

Сложно регулярно проверять реактивные двигатели и другие машины, не разбирая их, что является дорогостоящим и длительным процессом. Теперь команда из Гарвардского института Висса разработала маленьких роботов, похожих на насекомых, которые могут залезать внутрь и через машины, чтобы осматривать их, избавляя от необходимости разбирать их на части, если ничего не нужно ремонтировать.
Роботы основаны на предыдущем создании команды, которое они называют Гарвардским Амбулаторным Микро-Роботом (HAMR). Эти маленькие четвероногие роботы сновали как насекомые, и более поздняя версия обрела способность ходить по поверхности воды.
Новинки в области робототехники
Последняя модель была названа HAMR-E, где E обозначает электроадгезию. Чтобы взбираться по вертикальным поверхностям и цепляться вверх ногами, у роботов есть новые подножки, которые прилипают к металлическим поверхностям под действием электростатических сил. Подушки изготовлены из медного электрода с полиимидной изоляцией, и роботы могут отключить электрическое поле, чтобы поднять каждую ногу с поверхности, прежде чем снова включить его, когда он сделает следующий шаг.
Эти подушки также гибкие, чтобы позволить ботам взбираться по изогнутым поверхностям - удобный навык внутри реактивного двигателя. «Теперь, когда эти роботы могут исследовать пространство в трех измерениях вместо того, чтобы просто двигаться вперед и назад по плоской поверхности, существует совершенно новый мир, в котором они могут перемещаться и взаимодействовать», - говорит Себастьян де Риваз, первый автор исследования, описывающего HAMR. -E

«Однажды они могли бы обеспечить неинвазивный контроль труднодоступных участков больших машин, сэкономив компании время и деньги и сделав эти машины более безопасными». HAMR-E прилипает к поверхности, используя электро-клейкие ножки Электроадгезионные подножки - не единственное улучшение, необходимое для подъема этих новых роботов. Команда также разработала новые голеностопные суставы, которые могут вращаться в трех измерениях, сохраняя ориентацию робота в соответствии с местностью.
Также нужна была новая походка, чтобы убедиться, что за один раз поднимается только одна нога, в то время как остальные три остаются на поверхности, чтобы не упасть. В ходе испытаний HAMR-E мог проходить более 100 шагов подряд по вертикальной и перевернутой поверхности, не падая. Это также продемонстрировало, что он мог подниматься по изгибам реактивного двигателя, даже вверх ногами, с его подножками, компенсирующими неровные поверхности, увеличивая напряжение его электроадгезии.
Дальнейшее развитие технологии шагающих роботов
Следующие шаги для команды должны включить датчики, чтобы улучшить липкость HAMR-E на поверхностях, и дать ему рабочую нагрузку, чтобы он мог фактически проводить инспекции, для которых он так хорошо подходит. Маловероятно, что маленькие роботы когда-либо смогут выполнить ремонт, но они должны сэкономить время и деньги, не допуская разборки машин, когда им не требуется никакой работы.

«Эта итерация HAMR-E является первым и наиболее убедительным шагом к тому, чтобы показать, что этот подход к роботу для лазания сантиметрового масштаба возможен, и что такие роботы могут в будущем использоваться для исследования любой инфраструктуры, включая здания, трубы двигатели, генераторы и многое другое», - говорит Роберт Вуд, соответствующий автор исследования.
Автор статьи: Виктор Булавин
Похожие статьи:

 Онлайн супермаркет представляет первый прототип ARMAR-6 помощника по обслуживанию роботов
Онлайн супермаркет представляет первый прототип ARMAR-6 помощника по обслуживанию роботов
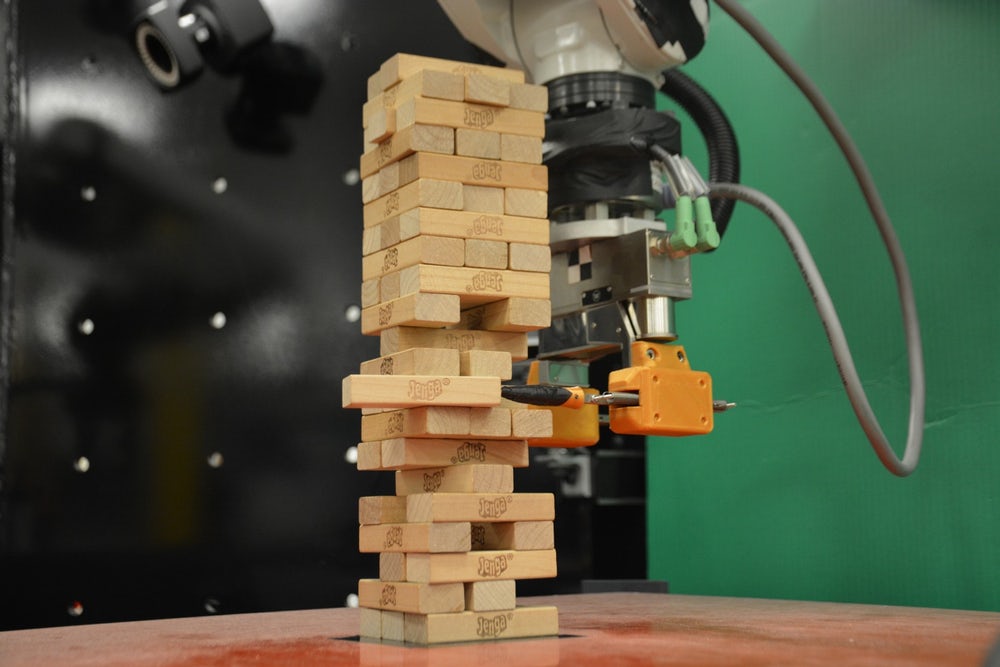 Робот MIT
Робот MIT
 Робот для работы с ядерными реакторами
Робот для работы с ядерными реакторами

 BreadBot робот-пекарь
BreadBot робот-пекарь
 Крошечные намагниченные роботы
Крошечные намагниченные роботы

 ABB роботы
ABB роботы







