
Новую стратегию передвижения демонстрирует робот трансформер
Создание обычных роботов требует тщательного сочетания компонентов. Теперь исследователи решили использовать совершенно новый подход, создав робота из множества машин поменьше

Создание обычных роботов требует тщательного сочетания таких компонентов, как двигатели, батареи, приводы, сегменты корпуса и колеса. Теперь исследователи решили использовать совершенно новый подход, создав робота из множества машин поменьше, чтобы продемонстрировать новую систему передвижения.
Будущий потенциал
Они могут делать только одно действие: взмахнуть двумя конечностями. Но когда пять таких устройств объединяются друг с другом, они формируют механизм, способный самостоятельно передвигаться. Добавление датчика света или звука позволяет супермашине двигаться в ответ на стимул - и даже управляться достаточно хорошо, чтобы ориентироваться в лабиринте.
Хотя сейчас это звучит элементарно, идея создания роботов из более мелких и использования их групповых возможностей могла бы обеспечить механический контроль над очень маленькими роботами. В конечном счете, возникающее поведение группы может обеспечить новый подход к движению и контролю для маленьких роботов, которые могут потенциально менять форму. «Это очень элементарные роботы, в поведении которых преобладают механика и законы физики», - сказал Дэн Голдман, профессор в Технологическом институте Джорджии.
«Мы не стремимся наложить на них сложный контроль, восприятие и вычисления. По мере того, как роботы становятся все меньше и меньше, нам придется использовать принципы механики и физики для управления ими, потому что у них не будет того уровня вычислений и ощущений, который необходим нам для обычного управления».
Исследование и появление технологии
Исследование, которое было поддержано Исследовательским отделом армии и Национальным научным фондом, было опубликовано в журнале Science Robotics. Исследователи из Северо-Западного университета также внесли свой вклад в проект.
Основой для исследования послужил маловероятный источник: исследование основных продуктов. Выливая эти сверхпрочные скобы в контейнер со съемными сторонами, бывший доктор философии Ник Грэвиш - ныне преподаватель в Калифорнийском университете в Сан-Диего - создал сооружения, которые будут стоять самостоятельно после снятия стенок контейнера.
Встряхивание опорных башен в конечном итоге привело к их разрушению, но наблюдения привели к осознанию того, что простое запутывание механических объектов можно создать структуры с возможностями, значительно превосходящими возможности отдельных компонентов. «Робот, сделанный из других элементарных роботов, стал нашей инновационной идеей», - сказал Голдман. «Вы можете представить себе робота, в котором вы бы немного подправили его геометрические параметры, и в результате изменили его поведение на корню».
Передвижение роботов
Чтобы исследовать эту концепцию, аспирант Уилл Савойе использовал 3D-принтер для создания устройств на батарейках, которые имеют двигатели, простые датчики и ограниченную вычислительную мощность. Устройства могут менять свое местоположение только тогда, когда они взаимодействуют с другими устройствами, будучи окруженными кольцом. «Несмотря на то, что ни один отдельный робот не мог двигаться сам по себе, облако, состоящее из нескольких роботов, могло двигаться, раздвигаясь и уменьшаться», - объяснил Голдман.
«Если вы поместите кольцо вокруг облака маленьких роботов, они начнут пинать друг друга, и большее будет перемещаться случайным образом». Исследователи заметили, что, если один маленький робот перестанет двигаться, возможно, из-за того, что его батарея умерла, группа умных роботов начнет двигаться в направлении этого остановленного робота. Аспирант Росс Варкентин узнал, что он может контролировать движение, добавляя фотодатчики к роботам, которые останавливают взмах руки, когда сильный луч света попадает в одного из них.
«Если вы наклоните фонарик под прямым углом, вы можете выделить робота, которого хотите отключить, и это заставит кольцо крениться к нему или от него, даже если роботы не запрограммированы на движение к свету», - сказал Голдман. «Это позволило с легкостью управлять всеми роботами сразу». Профессор Курт Визенфельд и аспирант Зак Джексон смоделировали движение этих роботов, чтобы понять, как толчки и радиус кольца влияют на общее движение.
Исследователи из Северо-Западного университета изучали, как взаимодействие между смартами обеспечивает направленный контроль. «В каждого робота встроен двигатель, генерирующий достаточно мощности для передвижения», - сказал Тодд Мёрфи, профессор машиностроения, работавший с северо-западными аспирантами Томасом Берруэта и АнойПерван. «Мы узнали, что несмотря на то, что каждый из мелких обьектов действует хаотично, структура, которую они составляют, движется по определенной траектории, и это можно очень эффективно использовать».
В будущей работе Голдман предполагает более сложные взаимодействия этих роботов. «Люди были заинтересованы в создании определенного вида роевых роботов, которые будут состоять из других», - сказал он. «Эти структуры могут быть переконфигурированы по требованию для удовлетворения конкретных потребностей путем изменения их геометрии».
Военное применение
По словам Сэма Стэнтона, проект представляет интерес для армии США, поскольку он может привести к созданию новых роботизированных систем, способных изменять свои формы, модальности и функции. Он является руководителем программ по комплексной динамике и системам в Исследовательском бюро армии, входящем в состав Исследовательской лаборатории армии по развитию боевых возможностей армии США.
«Предполагается, что беспилотные системы и сети будущих армий способны трансформировать свою форму, модальность и функции. Например, робот-рой может когда-нибудь сможет перебраться к реке и затем автономно сформировать структуру, чтобы создать мост», - сказал Стентон. «Исследования Дана Голдмана направлены на выявление физических принципов, которые могут оказаться важными для разработки возникающего поведения в будущих коллективах роботов, а также для нового понимания фундаментальных компромиссов в производительности системы, быстроте реагирования, неопределенности, отказоустойчивости и адаптивности».
Автор статьи: Виктор Булавин
Похожие статьи:

 Свою первую коммерческую пробную версию в США Google запустил проект интернет-аэробуса
Свою первую коммерческую пробную версию в США Google запустил проект интернет-аэробуса

 Итальянский гусеничный грузчик выходит на улицы
Итальянский гусеничный грузчик выходит на улицы

 С Minecraft Earth и дополненной реальностью теперь можно строить в реальном мире
С Minecraft Earth и дополненной реальностью теперь можно строить в реальном мире

 Masterkey 4.0 кладет проецируемую клавиатуру и экран в карман
Masterkey 4.0 кладет проецируемую клавиатуру и экран в карман

 Как может полностью изменить мир первый в мире цифровой выключатель
Как может полностью изменить мир первый в мире цифровой выключатель
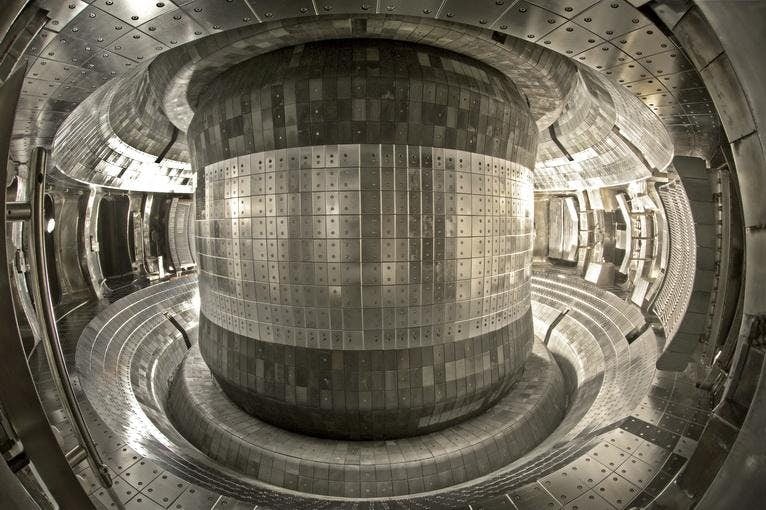 Искусственное солнце Китая достигает 100 миллионов градусов
Искусственное солнце Китая достигает 100 миллионов градусов







