
- Главная
- >
- Роботы
- >
- Военные роботы и боевые роботы
- >
- Поисковые и спасательные роботы
Поисковые и спасательные роботы
Идея поисково-спасательных роботов возникла в начале 1980-х годов. Тем не менее, до 1990-х годов в этой области не было реального развития. Хотя роботы широко не используются в реальных ситуациях поиска и спасания, на данный момент разработка в этой области представляется весьма перспективной.
Идея поисково-спасательных роботов возникла в начале 1980-х годов. Тем не менее, до 1990-х годов в этой области не было реального развития. Хотя роботы широко не используются в реальных ситуациях поиска и спасания, на данный момент разработка в этой области представляется весьма перспективной.
В первый момент все может показаться довольно простым - нам нужны роботы, которые могли бы проникнуть в обломки и найти людей под ними. Хотя эта задача сама по себе довольно сложна, поиск и спасение намного шире. Существует множество возможных ситуаций и различных задач, которые могут выполнять роботы.
Поисковые и спасательные ситуации

Есть много вещей, которые могут пойти не так и повлиять на определенную часть населения. Могут быть пожары, цунами, землетрясения и техногенные катастрофы, такие как Чернобыль или 9/11. Некоторые из этих бедствий могут создавать подобные последствия; некоторые, с другой стороны, могут быть совершенно уникальными. Двумя наиболее распространенными случаями являются поиск и спасение в городах (US & R, USAR) и поиск и спасение в широкой области. Эти ситуации могут быть вызваны как мужчинами, так и природой. Землетрясение, а также бомбардировка могут создать ситуацию USAR. Обычно, когда речь идет о ситуации поиска и спасения в городской среде, спасатели должны иметь дело с разрушенными зданиями, жертвами, оказавшимися под обломками, и другими проблемами, уникальными для такой среды. Кроме того, следует отметить, что беспроводная связь может быть серьезно нарушена из-за большого объема стали в щебне.
С другой стороны, широкомасштабные поисково-спасательные ситуации обычно вызваны стихийными бедствиями, такими как наводнения и пожары. В этих случаях для поиска жертв требуется большое количество небольших и средних зданий. Обычно в этих ситуациях коэффициент выживаемости намного выше по сравнению с USAR. Возможны также другие поисково-спасательные ситуации, такие как поиск и спасение на водной основе и в пустыне. Водный S & R занимается наводнениями или дорожно-транспортными происшествиями. Wilderness S & R занимается поиском людей, погибших в пустыне. Конечно, эти ситуации могут значительно перекрываться. Землетрясение может повлиять на обширную территорию, разрушающую город, разрушение плотины и нарушение связи с некоторыми туристами. В этом случае это землетрясение вызовет все вышеупомянутые ситуации. Хорошо, может, я немного преувеличил, но вы поняли.
Возможны и другие ситуации, такие как воздушное и морское S & R. Спасательные роботы в настоящее время разрабатываются и тестируются в основном в вышеупомянутых ситуациях. Иногда говорят, что происходят антропогенные катастрофы и стихийные бедствия. Как правило, человеческие бедствия, как говорят, создают ситуации USAR во время стихийных бедствий - ситуации, которые я назвал широкомасштабной S & R. Я решил использовать вышеупомянутое подразделение, потому что человек может начать лесной пожар, и землетрясение может разрушить здание. Однако есть некоторые отличительные черты, когда речь идет об искусственных катастрофах. Они могут включать в себя обращение с опасными материалами, радиацией и другими неприятными вещами, считая Чернобыль.
Задачи под рукой и подходящие роботы

Итак, вы хотели бы знать, какие задачи могут быть предприняты поисковыми и спасательными роботами для помощи спасателям. Несмотря на то, что на месте спасания есть много задач, роботы должны использоваться там, где человеческие или собачьи спасатели бессильны или где роботы могут выполнять задачи под рукой более эффективно. Разведывательная и картографическая деятельность является особенно важной задачей в ситуациях спасения в больших районах, создаваемых стихийными бедствиями. В этих ситуациях необходима оценка ситуации для успешного запуска поисково-спасательных миссий. В этой задаче беспилотные летательные аппараты могут быть очень полезными.
Поиск - еще одна важная задача. Сначала жертвы должны быть найдены, чтобы спасти их. Чтобы использовать роботы для поиска в ситуациях S & R в широкой области, им нужно будет сделать работу как минимум так же эффективно, как люди. Возможно ли это спорный вопрос. Однако есть большие надежды, что роботы будут помогать поисковым миссиям в городских поисково-спасательных ситуациях в обозримом будущем.
Небольшие беспилотные наземные транспортные средства могут проникать в щебень глубже, чем люди или спасатели собак, что позволяет спасателям быстрее находить жертв. Другие ситуации проникновения щебня. Способность роботов проникать в щебень может быть использована и для других целей. Эта способность может быть использована для оказания помощи в структурном обследовании щебня, обеспечивая более полное и полное представление. Также с помощью этой способности можно было бы получить медицинскую оценку на месте. Удаление щебня и помощь в изъятии пострадавших. Операции по удалению щебня в поисково-спасательных ситуациях значительно отличаются от операций по удалению щебня при строительстве или сносе. Тем не менее, спасательные роботы и экзоскелеты могут использоваться для спасения спасателей в этой задаче.
Telepresence - это еще одно приложение для роботов, которое может найти свой путь в ситуациях S & R. Один из способов использования телеприсутствия - использовать спасательный робот как «уши и глаза» члена команды, который находится за пределами обломков. Таким образом, потребности команды могут быть переданы быстрее. Кроме того, телемедицина может быть очень полезной. Логистика. Большие беспилотные наземные транспортные средства могут также использоваться для целей логистики. Было бы довольно легко адаптировать специальные военные транспортные роботы для использования в качестве спасательных роботов. Это может быть одной из достижимых задач в ближайшем будущем. Тяжёлые ситуации также могут выиграть от использования робота. Такие искусственные катастрофы, как Чернобыль, можно было бы обработать более успешно, если бы использовались роботы. Кроме того, роботы могли бы начать поиск в местах, где все еще горит, и в других ситуациях, когда человеческие спасатели беспомощны. Как вы видите, некоторые из этих приложений аналогичны приложениям для военных роботов, но многие из них уникальны. Обычно роботы, предназначенные для других задач, оборудованы и приспособлены для использования в ситуациях поиска и спасания.
Фактические заявки и исследовательские работы
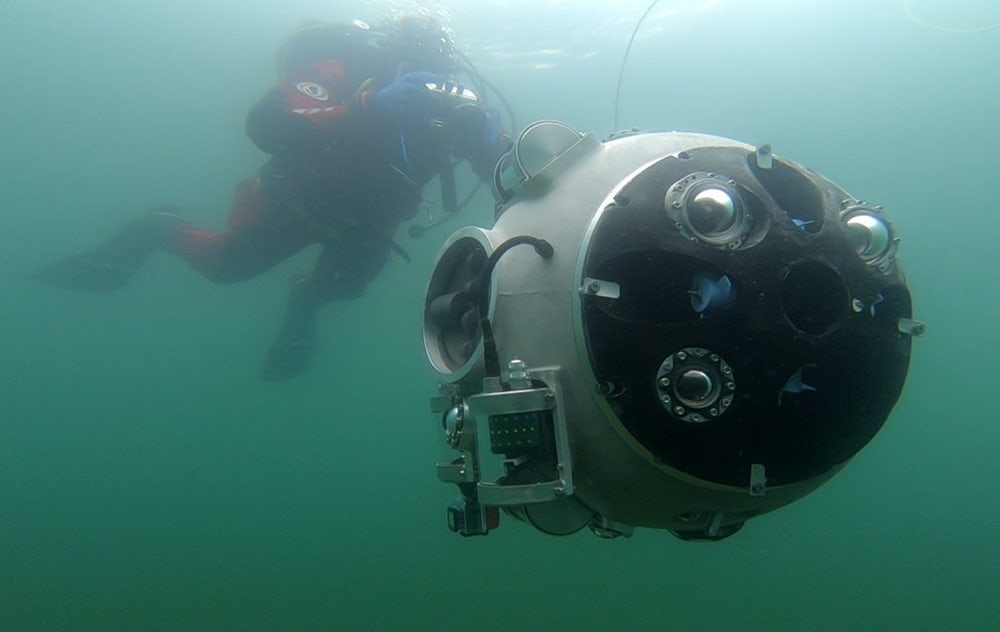
Хотя потенциал этой области огромен, насколько мне известно, фактическое применение не широко распространено. На этом снимке есть дистанционно управляемые подводные аппараты, такие как VideoRay. Такие устройства довольно широко распространены. Также некоторые БПЛА, такие как Predator, были добавлены в реальное приложение. Тем не менее спасательные роботы еще не используются спасательными группами на сайтах USAR. Это связано с общим подозрением и недостаточно развитыми технологиями. В настоящий момент для работы спасательного робота требуется команда не менее 2-3 человек.

Однако роботы использовались в различных катастрофах научно-исследовательскими институтами с различным успехом. Роботы Inuktun и Foster-Miller использовались в 9/11, где они довольно успешно управляли поиском примерно 10 наборов останков. Также БПЛА были использованы и испытаны на многочисленных ураганах исследовательскими учреждениями. Есть два основных исследовательских учреждения в этой области, о которых я знаю - CRASAR, который означает «центр для поиска и спасения роботов» и Международный институт спасательной системы. Первая основана в США и вторая в Японии.Я очень надеюсь, что вы заинтересованы в этой области. Я был бы еще счастливее, если бы сумел вызвать этот интерес к тебе. Вещи, которые я сказал здесь, являются лишь небольшой частью этой многообещающей и быстро развивающейся области. Надеюсь, мне удалось дать вам введение по этой теме, и вы нашли здесь что-то новое.
Автор статьи: Виктор Булавин
Похожие статьи:
 История военных роботов
История военных роботов

 Аппарат Nomad
Аппарат Nomad

 Робот Megabots победил Toyota Prius
Робот Megabots победил Toyota Prius

 Роботы, обезвреживающие бомбы
Роботы, обезвреживающие бомбы

 Американская армия разрабатывает ПО для военных роботов
Американская армия разрабатывает ПО для военных роботов

 Робот UX-1 для поиска мин
Робот UX-1 для поиска мин







