
Рука робота научилась играть на пианино
Исследователи из Кембриджского университета решили упростить дизайн и сократить программирование, необходимое для управления роботизированной рукой, и разработали мягкого бота, играющего на пианино

Подражание сложному движению человеческой руки не простая задача для роботов. Наряду с множеством костей и суставов, есть сухожилия, связки, мышцы, нервы и многое другое, чтобы попытаться соответствовать для робота .
Исследователи из Кембриджского университета решили упростить дизайн и сократить программирование, необходимое для управления роботизированной рукой, и разработали мягкого скелетобота, играющего на пианино, который раскачивает клавиатуру.
Создание новой технологии подобной человеческой руке
Рука робота была напечатана на 3D-принтере Stratasys Connex 5000 с использованием мягких и жестких материалов, которые по существу копировали кости и связки человеческой руки. Он был прикреплен на запястье к роботизированной руке UR5, что позволяло точно контролировать скелетную руку с помощью Python API.
Пальцы не имеют никаких приводов или гидравлики, поэтому не могут двигаться самостоятельно
На пальцах нет никаких исполнительных механизмов или гидравлики, поэтому они не могут двигаться самостоятельно, но, повернув руку на запястье, исследователям удалось выбрать клавиши на клавиатуре пианино и сыграть простые мелодии. А благодаря 3D-печати исследователи смогли варьировать жесткость связок между костями, обеспечивая гибкость игры и движения.
«Наши тела состоят из умных механических конструкций, таких как кости, связки и кожа, которые помогают нам вести себя разумно, даже без активного контроля со стороны мозга», - говорит руководитель проекта доктор Фумия Иида.
«Используя современную технологию 3D-печати для печати мягких рук, похожих на человеческие, мы теперь можем исследовать важность физического дизайна в отрыве от активного контроля, что невозможно сделать с пианистами-людьми, поскольку мозг не может быть «выключен», как наш робот». Ученые изучили постукивание одним пальцем, движение большого пальца и поведение руки. Четыре отдельных пальца были использованы для первой серии экспериментов, где наблюдались разные параметры контроля.
Эксперименты с движением большого пальца включали в себя как большой, так и указательный пальцы, с целью воспроизвести поведение игроков-людей при плавном последовательном перемещении по нотам. А переходы были целью игры, когда смотрели на полное поведение руки. Чувствительные к силе резисторы на пианино передавали воспроизводимые данные в микроконтроллер Arduino в реальном времени для измерения поведения и производительности.
«Мы можем использовать пассивность для достижения широкого диапазона движений роботов: например, при ходьбе, плавании или полете», - сказала Джози Хьюз из команды. «Продуманная механическая конструкция позволяет нам достичь максимальной дальности движения при минимальных затратах на управление: мы хотели увидеть, сколько движения мы можем получить только с помощью одной механики».
Есть много примеров более продвинутых рук роботов, и эта не выиграет ни одного соревнования по игре на пианино, но исследователи говорят, что это может привести к созданию роботов, способных к более естественному движению при одновременном сокращении потребления энергии.
Исследование может быть расширено в будущем, чтобы исследовать более сложные манипуляции, что может привести к разработке роботов, которые используют этот подход для выполнения медицинских задач или для обработки хрупких объектов. Статья, детализирующая исследование, была опубликована в журнале Science Robotics. Видео ниже.
Автор статьи: Виктор Булавин
Похожие статьи:

 Лучшие роботы на выставке CES - 2017 год
Лучшие роботы на выставке CES - 2017 год
 Ускорители частиц не разрушат планету но люди могут
Ускорители частиц не разрушат планету но люди могут
 Деятельность роботов может влиять на детей
Деятельность роботов может влиять на детей

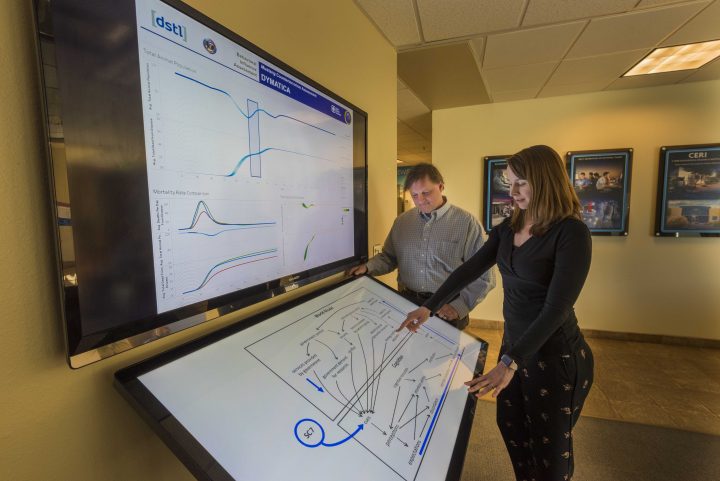 Моделирование террористического поведения с помощью социокультурных оценок
Моделирование террористического поведения с помощью социокультурных оценок

 Робот от MIT может подбирать предметы с которыми никогда раньше не сталкивался
Робот от MIT может подбирать предметы с которыми никогда раньше не сталкивался
 Оптоволоконный кабель способный передавать данные со скоростью 100 Гбит / с продемонстрировали Nokia и Vodafone
Оптоволоконный кабель способный передавать данные со скоростью 100 Гбит / с продемонстрировали Nokia и Vodafone







