
Робот от MIT может подбирать предметы с которыми никогда раньше не сталкивался
Одна из вещей, в которой хороши роботы – это повторять что-либо снова и снова. Дайте им объекты разных форм и размеров, с различными инструкции к ним, и это уже совсем другая история, это робот MIT

Одна из вещей, в которой хороши роботы – это повторять что-либо снова и снова. Дайте им объекты разных форм и размеров, с различнымиинструкции к ним, и это уже совсем другая история.
Стремясь расширить эти возможности, ученые из Лаборатории компьютерных наук и искусственного интеллекта MIT (CSAIL) разработали новую универсальную роботизированную машину, которая, по их словам, может научиться поднимать и класть обратно, все виды вещей, даже те, которые никогда раньше не видела.
«Всякий раз, когда вы видите, вы должны внимательно смотреть на то, чего робот не делает», - говорит профессор MIT Расс Тедрейк, старший соавтор новой статьи о проекте.
«Роботы могут поднять почти все что угодно, но если это объект, которого они раньше не видели, они не смогут его реально осмыслить». Эта работа перекликается с аналогичными исследовательскими проектами CSAIL и других стран, целью которых является создание роботов, которые могут обращаться с различными объектами.
Они включают в себя мягкие роботизированные захваты обычной формы вместе с более необычными конструкциями, напоминающими зеленые капли, рыб и (новинка этой недели) венерину мухоловку
Трех точек достаточно
Но исследователи CSAIL говорят, что типичные роботизированные захваты в основном полагаются на оценку положения и ориентации объекта, используя алгоритмы, основанные на геометрии, чтобы захватить их.
По их мнению, это как некоторые ограничения, особенно при захвате предметов совершенно разных форм и попытке положить их обратно с любой степенью деликатности. Вместо этого их новый подход опирается на выбор ключевых точек на объекте, который он интерпретирует как координаты. В качестве примера они предлагают кружку, для которой системе нужны только три координаты, с ключевыми точками в центре стороны кружки, снизу и на ручке.
Это управляющаяпрограмма, называемая KPAM (система управления с помощью достаточных ключевых точек, Keypoint Affordance Manipulation), разработана для обеспечения большей гибкости роботов.
С помощью системы шесть ключевых точек, ученые смогли заставить робота, управляющего KPAM, подбирать более 20 различных пар обуви, включая все, от тапочек до ботинок. И хотя он столкнулся с некоторой проблемой, пытаясь подобрать пару высоких каблуков, добавление нескольких пар к обучающей выборке для его нейросети быстро привело к выполнению задачу.
«Понимания всего лишь немногого об объекте - расположения нескольких ключевых точек - достаточно, чтобы обеспечить широкий спектр полезных манипуляционных задач», - говорит Тедрейк. «И это конкретное представление прекрасно работает с современным восприятием машинного обученияи разработки алгоритмов».
Что смогут роботы в будущем
В ходе дальнейшей работы команда надеется усовершенствовать технологию KPAM, чтобы она могла выполнять даже более общие задачи, такие как расстановка посудомоечной машины или чистка кухонных столов.
Более того, они говорят, что их способ обученияв процессе работы означает, что он может легко стать частью более крупных манипуляторных систем на фабриках и т.п. Документ, описывающий исследования доступен в Интернете, и Вы можете увидеть KPAM в работе на видео ниже.
Автор статьи: Виктор Булавин
Похожие статьи:

 Первый в мире закон о борьбе с шифрованием
Первый в мире закон о борьбе с шифрованием
 Scrobby автономный робот-очиститель работающий от солнечных батарей
Scrobby автономный робот-очиститель работающий от солнечных батарей

 Boston Dynamics празднует надвигающиеся коммерческие продажи перетаскивая грузовик с помощью 10 робо-собак
Boston Dynamics празднует надвигающиеся коммерческие продажи перетаскивая грузовик с помощью 10 робо-собак

 Робот HERMES управляется специальным жилетом который помогает ему оставаться сбалансированными
Робот HERMES управляется специальным жилетом который помогает ему оставаться сбалансированными
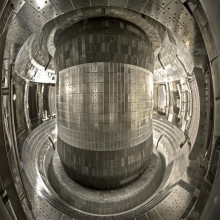
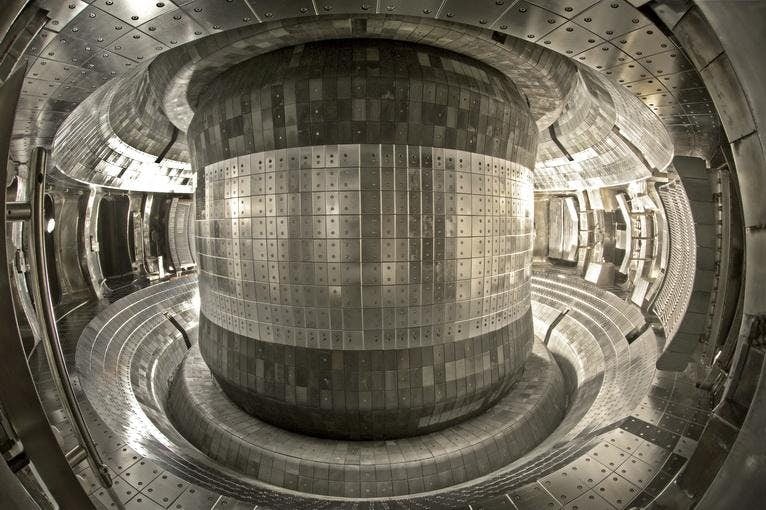 Искусственное солнце Китая достигает 100 миллионов градусов
Искусственное солнце Китая достигает 100 миллионов градусов
 Пплавает быстрее чем ее настоящие сородичи роботизированная медуза с пневматическим двигателем
Пплавает быстрее чем ее настоящие сородичи роботизированная медуза с пневматическим двигателем







