
- Главная
- >
- Роботы
- >
- Космические роботы в космосе
- >
- Собственный марсоход разработали энтузиасты JPL
Собственный марсоход разработали энтузиасты JPL
Для тех кто вдохновился дизайном Mars Curiosity Rover, планы сборки и инструкции теперь доступны для бесплатной загрузки. Спускаемый аппарат NASA приземлился на поверхности Марса в августе 2012 года.
 Спускаемый аппарат NASA приземлился на поверхности Марса в августе 2012 года , марсоход выполнил свою миссию. После того как бесстрашный иследователь сделал свое дело, NASA нуждались в образовательном проекте, который помог бы объяснить технологии и цели миссии широкой общественности. Эта роль была предоставлена уменьшенной версией под названием ROV-E, и теперь студенты, ученые, у которых есть свободная минутка, могут построить свой собственный мини-марсоход для изучения кратеров на заднем дворе и огромных горных хребтов в саду.
Спускаемый аппарат NASA приземлился на поверхности Марса в августе 2012 года , марсоход выполнил свою миссию. После того как бесстрашный иследователь сделал свое дело, NASA нуждались в образовательном проекте, который помог бы объяснить технологии и цели миссии широкой общественности. Эта роль была предоставлена уменьшенной версией под названием ROV-E, и теперь студенты, ученые, у которых есть свободная минутка, могут построить свой собственный мини-марсоход для изучения кратеров на заднем дворе и огромных горных хребтов в саду.
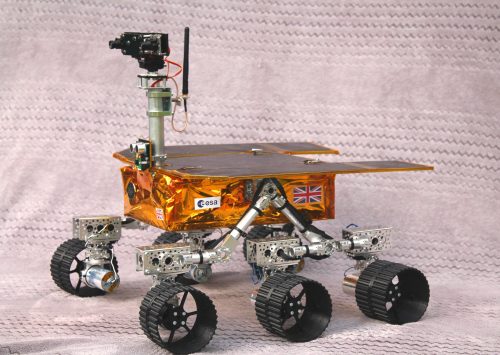
Уменьшенная копия Mars Curiosity Rover уже существует

На основании NASA Curiosity и Mars с 2020 вездеходов, то ROV-E мини-ровер был построен молодыми инженерами , а затем отправился на «гастроли» в 2015 году, посещение школ, университетов и музеев , чтобы вдохновить и привлечь молодежь - наших будущих инженеров. Аппарат был спроектирован так, чтобы отвечать на вопросы о Марсе публике и чтобы люди могли давать голосовые команды, чтобы аппарат передвигался. У него был встроенный звуковой динамик и мозг Arduino, трехмерные печатные компоненты и колеса для тележек с дистанционным управлением. Мини-марсоход также способен подключиться к Интернету. ROV-E был очень хорошо принят публикой и отвечая на многочисленные просьбы от людей, которые хотели построить свои собственные, инженеры из Лаборатории реактивного движения NASA в Caltech (JPL) разработали новую модель ровера, в которой любой, кто может накопить около 2500 долларов США, может построить для строить себя ровер из готовых частей. «Мы хотим сохранить сообщество и его традиции, а также снизить бартер понимания наших технологий, передав опыт новому поколению ученых, инженеров и программистов», - сказал Том Содерстром из проекта JPL.
Из чего собран ровер?
JPL's Open Source Rover имеет аналогичный шестиколесный рулевой механизм и подвеску с коротким корпусом. Базовая модель должна весить 11,34 кг и иметь площадь 61 x 30,5 см. Его батарея емкостью 5,200 мАч держится в течении 5 часов непрерывного использования, а управление осуществляется через Bluetooth с помощью приложения для Android или с помощью контроллера Xbox. Планы сборки, подробные инструкции по выполнению и список материалов были отправлены в GitHub для юных энтузиастов. В инструкциях рассматриваются многочисленные принципы аппаратного и программного обеспечения, и если робофанаты не представляют собе принцип создания точной копии ровера, то для них существует много других вариантов реализации дизайна и настроек сборки. «Мы выпустили этот ровер в качестве базовой модели, - сказал менеджер проекта Мик Кокс. «Мы надеемся, что сообщество внесет улучшения и дополнения роверу, и мы очень рады видеть, какие новшества добавятся к нему».
Автор статьи: Виктор Булавин
Похожие статьи:
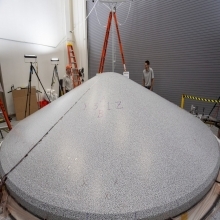
 Теплозащитный щит Mars 2020 прошел критический рубеж
Теплозащитный щит Mars 2020 прошел критический рубеж
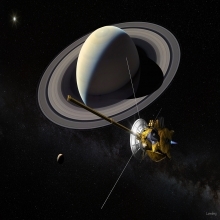
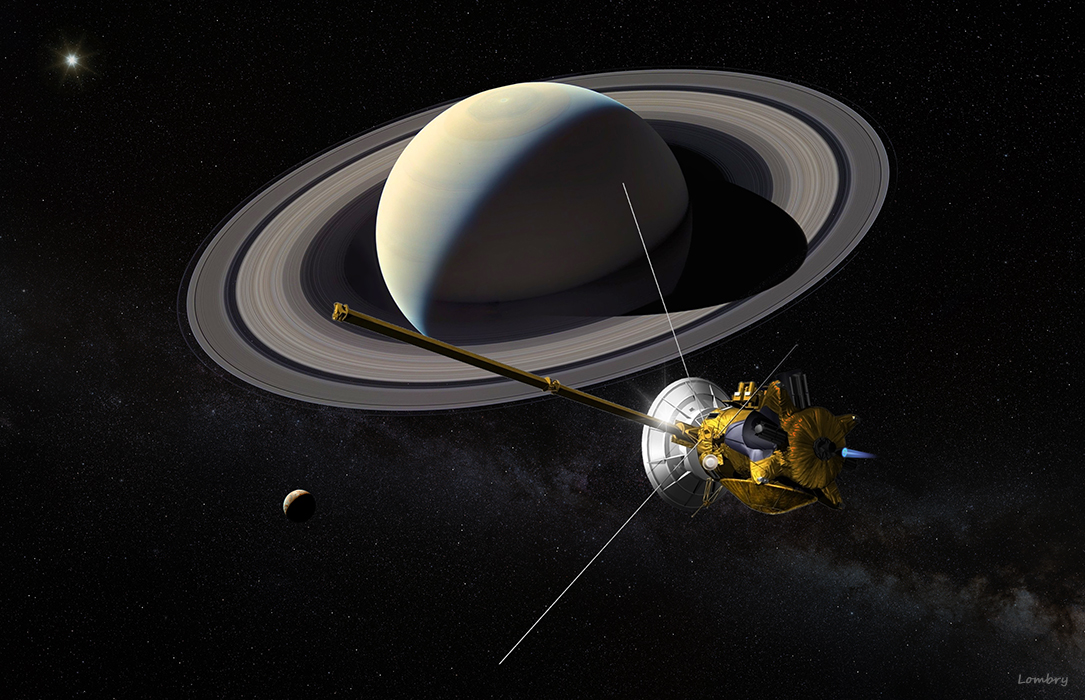 Новые скульптуры в кольцах Сатурна показывает Кассини
Новые скульптуры в кольцах Сатурна показывает Кассини
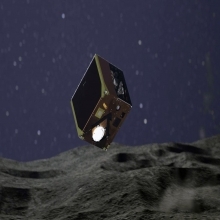
 Модуль присоединяется к японским роботам на астероиде Рюгу
Модуль присоединяется к японским роботам на астероиде Рюгу

 Водный Ровер BRUIE перемещается подо льдами
Водный Ровер BRUIE перемещается подо льдами

 На базе Raspberry Pi робот Yuri 3
На базе Raspberry Pi робот Yuri 3
 Беспилотник NASA завершает летные испытания
Беспилотник NASA завершает летные испытания







