
- Главная
- >
- Новости
- >
- Теперь роботами можно будет управлять специальными устройствами при помощи ультразвука
Теперь роботами можно будет управлять специальными устройствами при помощи ультразвука
Исследователи из Института интеллектуальных систем им. Макса Планка в Штутгарте разработали и изготовили неуправляемого робота, который может скользить по плоской или изогнутой поверхности

Исследователи из Института интеллектуальных систем им. Макса Планка в Штутгарте разработали и изготовили неуправляемого робота, который может скользить по плоской или изогнутой поверхности в жидкости при воздействии ультразвуковых волн.
Его движущая сила на два-три порядка выше, чем у природных микроорганизмов, таких как бактерии или водоросли. Он также способен перевозить полезные грузы. Следовательно, робот с акустическим приводом обладает значительным потенциалом для того, чтобы революционизировать технологию инвазивного лечения пациентов.
Немного о новом микророботе
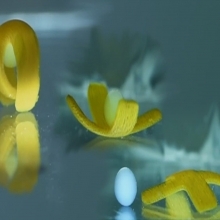
Исследователи из Института интеллектуальных систем им. Макса Планка (MPI-IS) в Штутгарте разработали синтетического миниатюрного робота в форме пули диаметром 25 микрометров, который двигается вперед под воздействием акустических волн. Робот в диаметре меньше человеческого волоса. Никогда раньше такой приводимый в действие микроробот не достигал такой скорости.
Его продуманный дизайн настолько эффективен, что даже превосходит плавательные способности природных микроорганизмов. Ученые сконструировали трехмерный полимерный микроробот со сферической полостью и небольшой трубчатой насадкой внизу. Окруженная жидкостью, такой как вода, то в полости образуется сферический воздушный пузырь. Как только робот подвергается воздействию акустических волн около 330 кГц, воздушный пузырь деформируется, толкая жидкость внутри трубки к задней части микроробота.
Движение жидкости затем продвигает устройство вперед со скоростью до 90 длин тела робота в секунду. Это сила тяги на два-три порядка больше, чем у естественных микроорганизмов, таких как водоросли или бактерии. Оба являются одними из самых эффективных микросвиммеров в природе, оптимизированных эволюцией.
Модернизация технологии
Использование ультразвуковых волн для манипулирования микророботами - не новый подход. Тем не менее, предыдущие роботы с возможностями плавания оказались относительно медленными, трудными в управлении и имели короткое время работы - всего несколько минут. Все эти факторы являются препятствиями для их использования в медицинских целях для адресной доставки лекарств, детоксикации или не инвазивных операций.
Ученые из отдела физической разведки в MPI-IS, доктора АмиррезаАгахани, Онкай Яса, Пол Вреде и доктор Метин Ситти, директор департамента, смогли точно настроить рулевые возможности своего робота, увеличив при этом время функционирования до нескольких часов. Их статья «Мобильные микророботы с акустическим приводом» была замечена в трудах Национальной академии наук в феврале 2020 года.
Дизайн робота
В дополнение к разработке робота с внутренней полостью, удерживающей сферический воздушный пузырь с небольшим отверстием, они добавили небольшой ребро к цилиндрической поверхности корпуса микроробота, что смещает направление движения. Они также покрыли верхнюю часть устройства магнитомягким слоем нанопленки. С помощью окружающих внешних магнитных полей они смогли изменить направление движения.
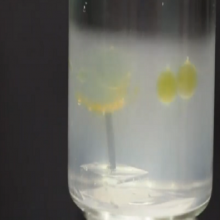
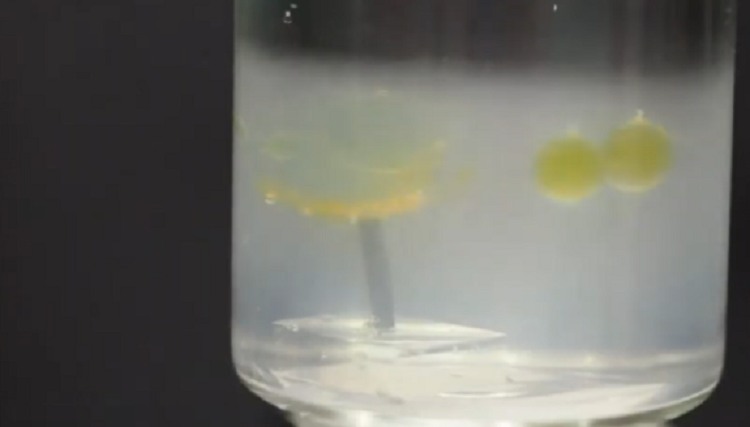
В нескольких экспериментах исследователи проверялось, насколько быстро их роботспособен перемещаться по разным поверхностям внутри микроканала, похожего на кровеносный сосуд. Они подвергли робота воздействию акустических и магнитных волн, успешно управляя им в этом ограниченном трехмерном пространстве. Они также показали, что захват груза происходит автоматически во время движения микроробота.
В то время как жидкость выталкивается из полости робота под воздействием ультразвуковых волн, круговой рисунок микропотоков формируется внизу. Этот ток гарантирует, что окружающие частицы лекарства направляются к роботу. Там частицы накапливаются и уносятся движением робота. Благодаря этому робот может однажды применяться для сбора частиц лекарства от рака в кровотоке и, в частности, для транспортировки лекарства к раку, освобождая груз с близкого расстояния для максимального воздействия.

Доктор Амирреза Агахани, научный сотрудник отдела физической разведки и соавтор публикации, обобщает особенности микроробота: «Мы можем очень эффективно приводить в действие наших микророботов, и они также очень быстры. Ультразвук безвреден и может проникать в области глубоко внутри тела человека. Мы можем перемещать этих роботов как на плоских, так и на изогнутых поверхностях контролируемым образом, и есть возможность прикреплять различные грузы, такие как лекарства. Это впечатляет».
Дополнительные возможности
Другим преимуществом является ультразвуковая визуализация. Внутри тела получить изображение очень сложно, а найти маленького робота еще сложнее. «Однако захваченный воздушный пузырь может действовать как контрастное вещество, делая робота и его местоположение более заметным», - добавляет доктор Агахани.
«Уже в ближайшем будущем мы надеемся развернуть такие микророботы с акустическим приводом и магнитным управлением внутри тела человека для различных не инвазивных медицинских применений», - заключает доктор Метин Ситти.
Автор статьи: Виктор Булавин
Похожие статьи:
 Работающий за счёт света и магнитов Представлен мягкий водный робот
Работающий за счёт света и магнитов Представлен мягкий водный робот

 Lockheed Martin и Boeing представили передовой штурмовой вертолет Defiant X
Lockheed Martin и Boeing представили передовой штурмовой вертолет Defiant X
 Помочь очистить загрязненную воду может крошечный мягкий робот
Помочь очистить загрязненную воду может крошечный мягкий робот
 Шесть последних тенденций в робототехнике и их последствия
Шесть последних тенденций в робототехнике и их последствия

 Китай телеграм чаты
Китай телеграм чаты
 Новый компонент для создания проводов – наноленты из металлизированного графена
Новый компонент для создания проводов – наноленты из металлизированного графена







