
Ученые используют магниты и свет для управления и перенастройки мягких роботов
Исследователи, финансируемые (NSF) из университетов штата Северная Каролина и Элон, разработали методику, которая позволяет дистанционно контролировать движение мягких роботов

Исследователи, финансируемые Национальным научным фондом (NSF) из университетов штата Северная Каролина и Элон, разработали методику, которая позволяет им дистанционно контролировать движение мягких роботов , фиксировать их в нужном положении в течение необходимого времени, а затем менять их форму. Технология основана на световых и магнитных полях.
Способы применения технологии
«Регулируя свойства материала, мы можем дистанционно управлять движениями мягкого робота; мы можем заставить его придерживаться заданной формы, затем мы можем вернуть роботу его первоначальную форму или изменить траекторию движения; и мы можем делать это неоднократно.
Все эти вещи ценны с точки зрения полезности этой технологии в биомедицинских или аэрокосмических приложениях», - говорит Джо Трейси, профессор материаловедения и инженерии в NC State и соответствующий автор статьи о работе. Статья была опубликована в журнале Science Advances. Пресс-релиз штата Северная Каролина содержит дополнительную информацию.
Тестирование методики
В ходе экспериментальных испытаний исследователи продемонстрировали, что мягких роботов можно использовать для формирования «захватов» для подъема и транспортировки объектов. Мягких роботов можно также использовать в качестве консолей или складывать в «цветы» с лепестками, которые разгибаются в разные стороны.
Автор статьи: Виктор Булавин
Похожие статьи:
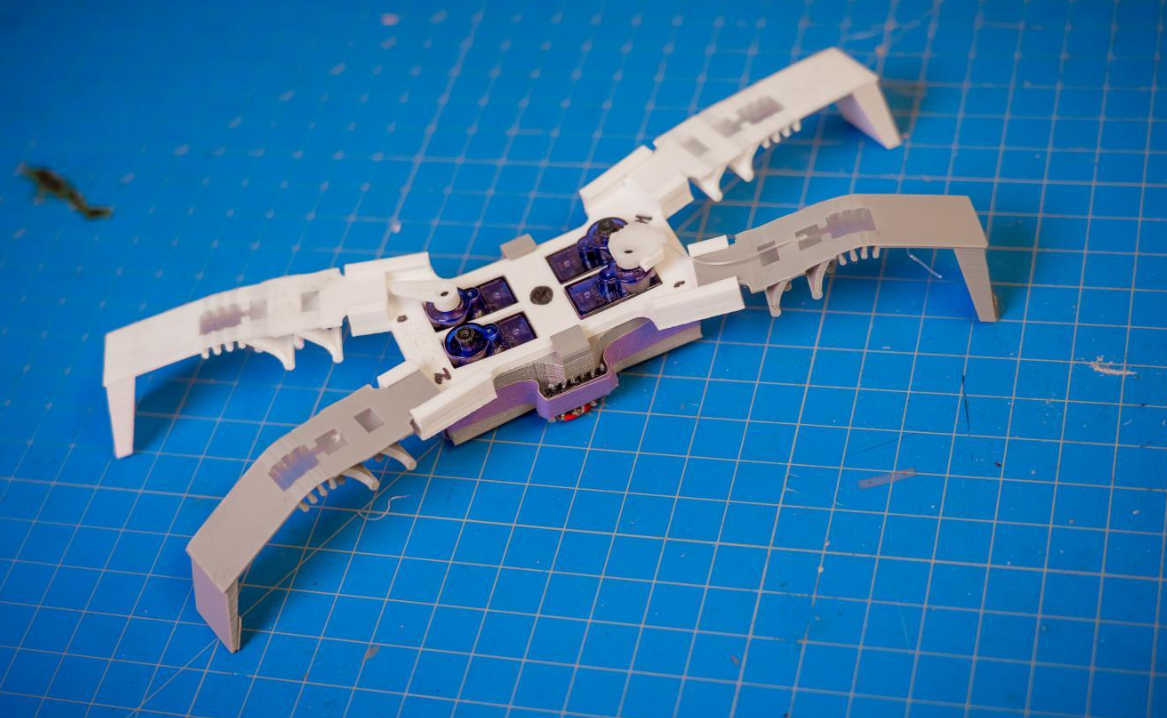 Созданные по подобию насекомых полумягкие флексоскелетные роботы
Созданные по подобию насекомых полумягкие флексоскелетные роботы
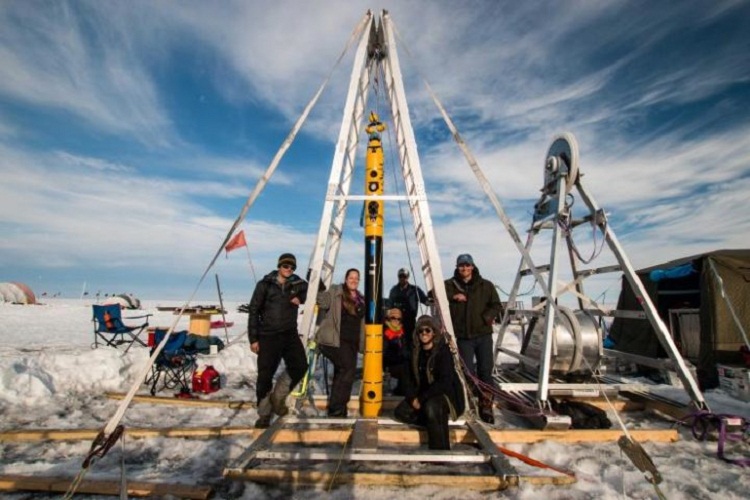 Роботизированная подводная лодка Icefin делает снимки у основания пресловутого антарктического ледника
Роботизированная подводная лодка Icefin делает снимки у основания пресловутого антарктического ледника

 Использует окружающую воду в качестве топлива робот Aqua Mav созданный на основе летучей рыбы
Использует окружающую воду в качестве топлива робот Aqua Mav созданный на основе летучей рыбы

 MoSculp превращает 2D-видео в 3D-печатные движения
MoSculp превращает 2D-видео в 3D-печатные движения

 Создание робота миллиметрового размера, который выглядит как паук
Создание робота миллиметрового размера, который выглядит как паук

 20% всех пылесосов в Мире - это роботы
20% всех пылесосов в Мире - это роботы







